研究紹介
運動軌道生成
-

位相フィードバックを用いた同期的運動軌道生成
位相フィードバックを用いて外部信号に適応したロボットの運動軌道生成法
-
PLLを用いたロボットの適応的運動軌道生成
PLLを用いて外部信号に適応したロボットの運動軌道を生成する手法

運動量空間による運動軌道生成
作業に不必要な関節自由度の有効利用を目的として、様々な作業目標に応じた運動軌道を運動量空間で生成する手法
-
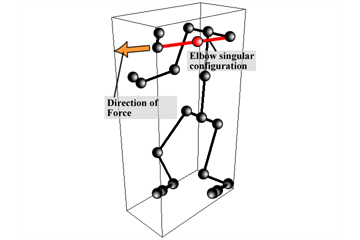
機構自由度の縮退活用動作
関節の縮退を利用したアクチュエータの選択的利用により、手先発生力の増大や全体エネルギーの消費を抑制する手法
ロボット安全
-
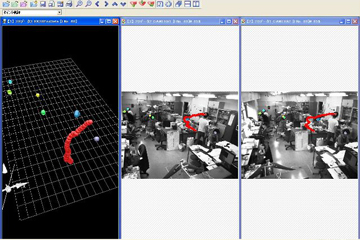
人間共存ロボットのリスク見積もり
人間の運動解析を利用した人間共存ロボットのリスク見積もり手法を考案しています
-
衝撃力軽減動作
人間共存ロボットに対して回避不可能な衝突が発生した際に積極的に腕部動作を行うことで衝突時の衝撃力軽減を実現させる手法
RTミドルウェア
-
RTミドルウエアを用いたエンジニアリングサンプル
産業用ロボットで必要とされる基本的な動作をRTミドルウエア上で簡単に再現できるサンプルの開発を行っています
歩容パターン生成
-
グラフ理論を用いた多脚歩行ロボットの歩容生成
グラフ探索によって脚の動かす順序を考え地形に適した歩行を行う
ロボットのための触覚
-

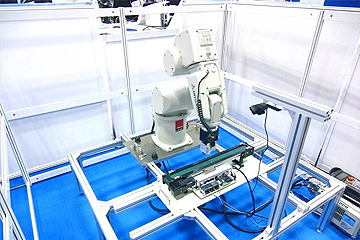
高精度なぞり動作で得られる振動情報を用いた機械学習による物体識別
マニピュレータによる高精度なぞり動作を用い表面状態が異なる物体を識別する
多脚歩行ロボット
-
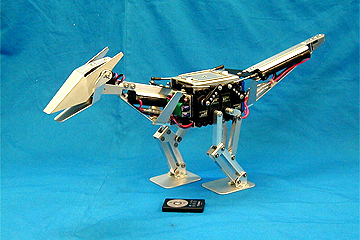
恐竜型2足歩行ロボット TITRUS III
人間型と違い、首と尾でバランスをとりながら歩行するロボットです。
-
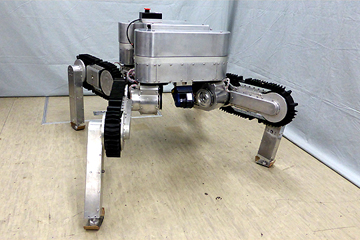
クローラ可変型4足歩行ロボット TITAN X
歩行とクローラ推進を選択的に切り替えて移動可能な4足歩行ロボットです

4足歩行型法面作業ロボット TITAN XI
法面で人間の代わりに補強工事を行う世界最大の4足歩行ロボット
-
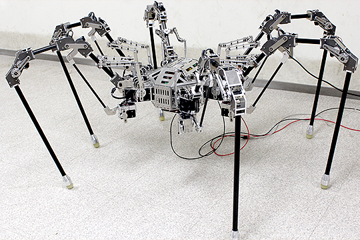
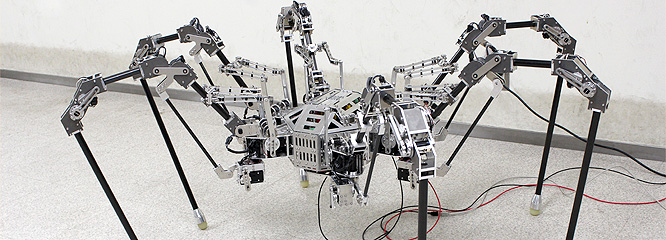
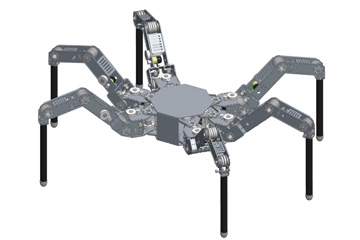
ザトウグモ型6脚歩行ロボット ASURA1号機
ザトウグモを規範とした長い脚を持つロボットです。高い不整地踏破性能が期待できます。
-
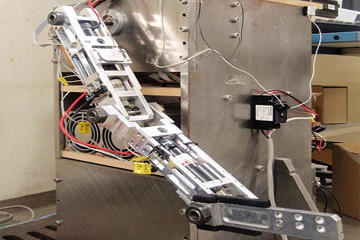
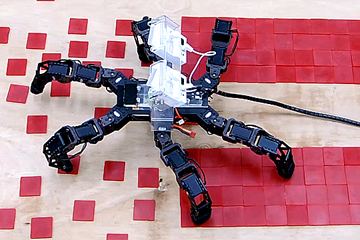
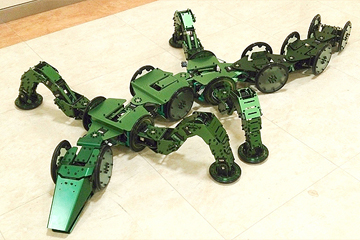
ザトウグモ型6脚歩行ロボット ASURA2号機
ワイヤ干渉駆動を脚機構に導入したザトウグモ型6脚ロボットです。関節可動範囲が大きい特徴があります。
-
トカゲ型移動ロボットSAURUS1号機
生物トカゲの形態を規範とした移動作業指向のロボット
屈曲推進ロボット
-
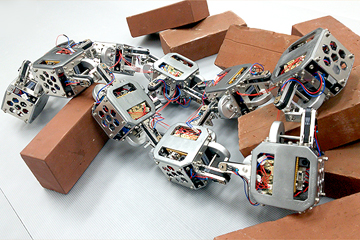
扁形生物型メッシュロボット WORMESH1号機
プラナリアやヒラムシなどの扁形生物を規範とした移動作業ロボット
-

滑空ヘビ型ロボット NURSE1号機
東南アジアに生息するトビヘビを規範としたヘビ型ロボット
テザーロボット
-
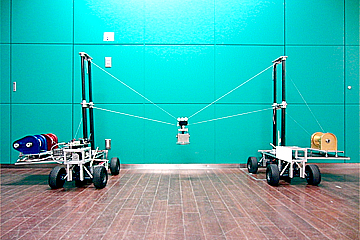
テザー懸垂装置による広域作業システム
2台の走行車両と2本のテザーを用いて作業機を遠隔駆動するシステム