運動量空間による運動軌道生成
Momentum trajectory generation using redundant joints as counter weight
解説図・実験写真
-
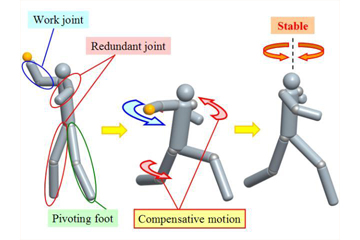
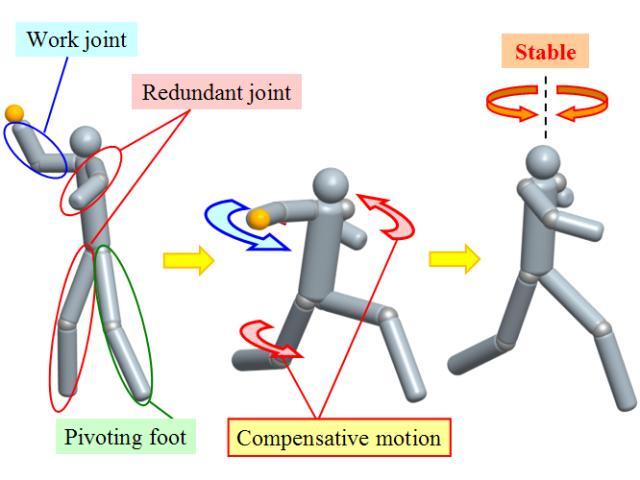
図1:人間の投球動作における力学的補償動作
人間は余剰な関節を利用することでバランスを保ったり、動作する腕や足のエネルギーの負担を低減したりしている
-
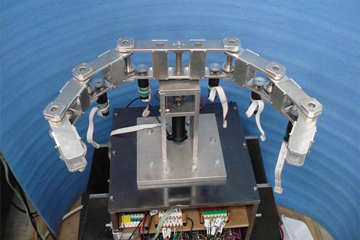
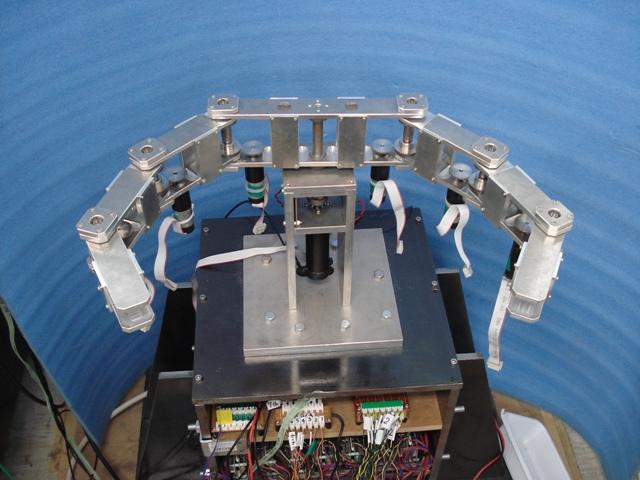
図2:平面7自由度双腕マニピュレータ
ヒューマノイドロボットの体幹、及び両腕を想定している
-
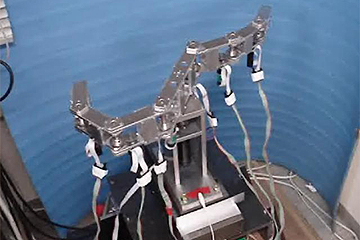
図3:投擲動作のバランス制御実験
本手法を用いた平面7自由度双腕マニピュレータの投擲動作におけるバランス制御実験の様子

研究概要
近年、ヒューマノイドロボットに代表されるような自立的な移動能力を持った多自由度ロボットの実現に伴い、これらを有効に利用するための運動制御や軌道生成手法に関する研究が盛んに行われている。 しかし、余剰な関節を積極的に活用する研究は、まだ少ないのが現状である。人間の運動を観察すると、例えば右腕でボールを投げる投球動作の場合、ボールを投げる右腕以外にも、左腕や軸足でない右足も動かせている。(図1) このような運動を機械やロボットの機構に置き換えると、余剰な関節をカウンターウェイトとして使用し、力学的補償動作を行っていると考えられる。 これまでに、ロボットの力学的補償動作を生成するために全運動量を考慮した運動生成手法が提案されているが、どのようにして運動量軌道を生 成するかについては、まだ議論がなされていない。 本研究では、作業を行う上で不必要な関節自由度の有効利用を目的として、様々な作業目標に応じた運動軌道を生成する修正運動量軌道生成法を提案している。 本手法では、あらかじめ計画された作業目標を実現する運動軌道から、運動量軌道を抽出して加工するため、運動量軌道の目標値をゼロから作り出す必要がない。 また、望みの手先軌道を実現しながら全身運動量を目的に応じて増加/減少させることができるため、余剰な関節を用いた力学的補償動作を生成でき、ロボットのバランス制御や駆動エネルギの低減など、様々な効果が期待できる。 また、 従来の位相フィードバック手法に運動予測を加えた手法も提案しています。 これまでに、ヒューマノイドロボットの体幹、及び両腕を想定して製作した平面7自由度双腕マニピュレータ(図2)について打撃動作、投擲動作のシミュレーションを行い、本手法を用いることでバランス制御、及び駆動エネルギの低減が可能であることを確認した。 また、実際に実機を用いて投擲動作のバランス制御を行うことにより、ロボットの体幹に発生する反力の総和、最大値共に低減できることを確認した。(図3)
参考文献
- 伊藤廣紀, 琴坂信哉, ''冗長関節をカウンターウェイトとして用いる運動軌道生成法の多自由度ロボットへの実装'', 日本機械学会関東関東学生会第49回学生員卒業研究発表講演会論文集2010, pp.283-284, 2010.
- 大森貴之, 琴坂信哉, 大滝英征, ''多自由度ロボットにおける冗長自由度を用いた力学的補償動作'', 日本機械学会関東支部第13期総会講演会講演論文集2007, pp.287-288, 2007.
- 大森貴之, 琴坂信哉, 大滝英征, ''冗長関節をカウンターウェイトとして用いる運動生成の提案'', 日本機械学会関東支部第12期総会講演会講演論文集2006, pp.279-280, 2006.