位相フィードバックを用いた同期的運動軌道生成
Trajectory generation for synchronous motion by phase feedback
解説図・実験写真
-
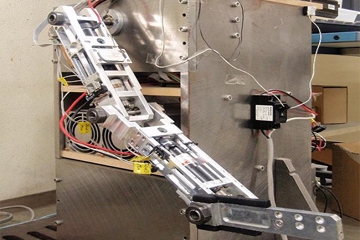
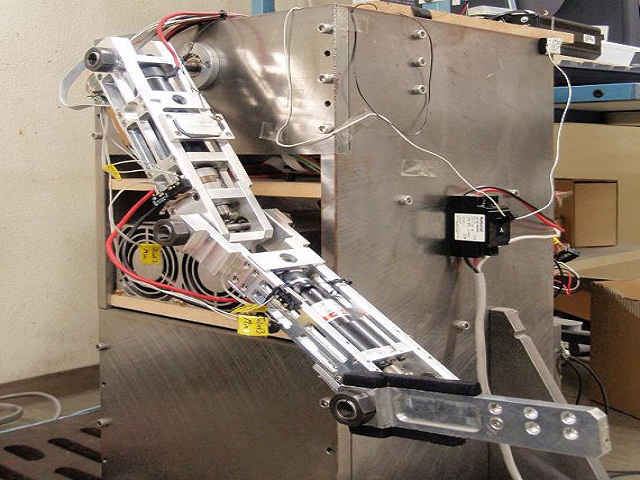
図1:平面3リンクマニピュレータ
人間の腕を想定した平面3リンクマニピュレータ
-
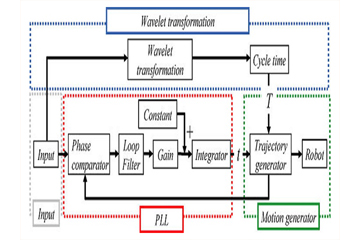
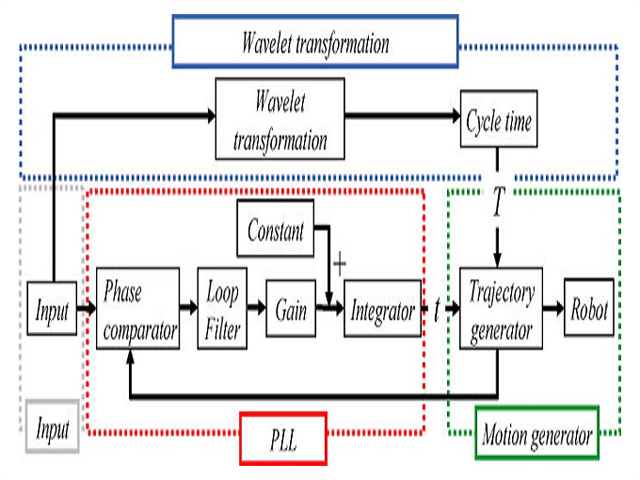
図2:ウェーブレット変換を用いた位相フィードバック手法
従来の位相フィードバック手法にウェーブレット変換を追加し、運動周期を抽出する
-
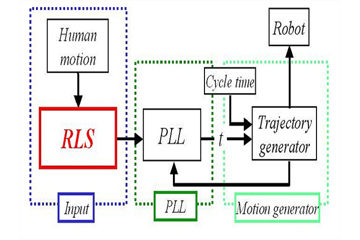
図3:運動予測を追加した位相フィードバック手法
従来の位相フィードバックに運動予測を追加した同期的運動軌道生成法
-
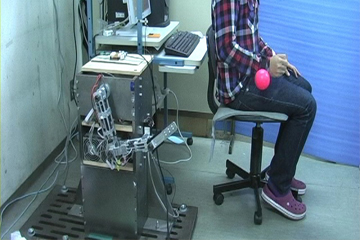
図4:人間とロボットの運動同期
人間の運動を計測し、ロボットがそれに合わせて運動を行います


研究概要
ロボットの活動分野の拡大のためには、人間の生活、および公共の場でもロボットが活躍することが求められます。 そのような中で、ロボットには人間の活動の代わりや、補助するために協調作業を行う能力が求められています。 そのためには、ロボットが時々刻々と変化する環境に合わせて作業を行う必要があります。 そこで本研究では、位相フィードバックを用いて外部信号に適応したロボットの運動軌道生成法を提案し、実験機(図1)により実証実験を行っています。 本研究の特徴として以下の3点が挙げられます。
- 運動軌道生成にフーリエ級数近似式を用い、任意の運動軌道が生成可能
- ウェーブレット変換を使用し、特定の運動周期を取り出すことで、複数の周期で構成される運動に同期可能(図2)
- ゲインのコントロールとロボット自身の運動軌道フィードバックに用いることで、動きの一部が隠された運動にも同期可能
- 同期対象とする人間の運動の振幅にばらつきがある場合、生成する運動軌道が歪む
- 同期対象の運動が不可視状態の場合、生成する運動軌道が歪む、同期しない
参考文献
- 生方崇之, 琴坂信哉, 大滝英征, ''位相フィードバックを用いたロボットの同期的運動軌道生成'', 第25回日本ロボット学会学術講演会, 2007.
- 渡邉明博, 程島竜一, 琴坂信哉, ''位相フィードバックを用いたロボットの同期的運動生成-運動予測による同期性能の改善-'', 第11回計測自動制御学会システムインテグレーション部門講演会, 2010.