PLLを用いた適応的運動軌道生成
Trajectory generation for adaptive motion by PLL
解説図・実験写真
-
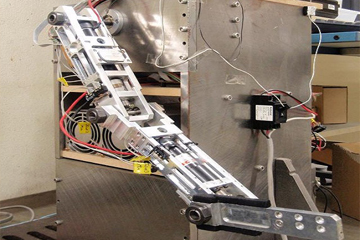
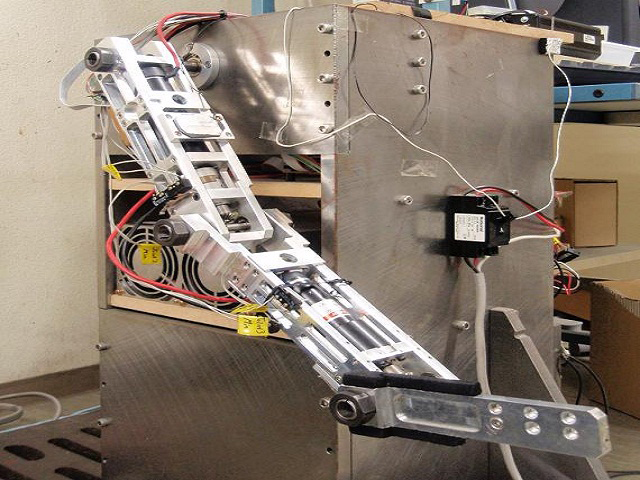
図1:平面3リンクマニピュレータ
人間の腕を想定した平面3リンクマニピュレータ
-
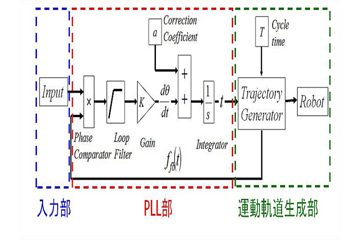
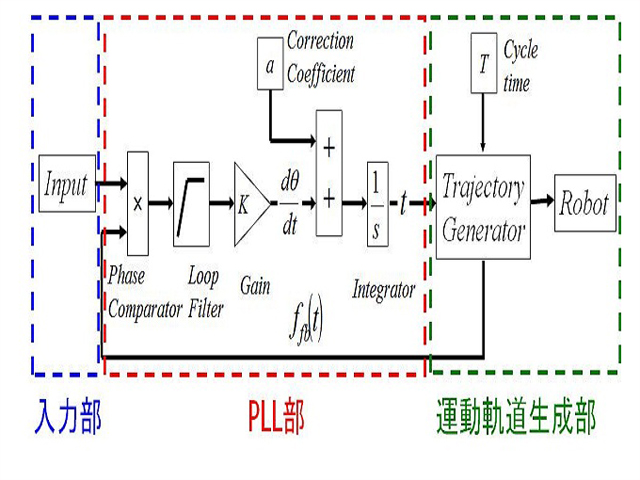
図2:ウェーブレット変換を用いた位相フィードバック手法
本手法は入力部、PLL部、運動軌道生成部の3つの部分から構成されている
研究概要
近年、ロボットは様々な形で利用されてきており、実生活内にもエンターテイメントロボットなどが登場しています。 しかし、実生活内で使用されるロボットは、作業の手助けといった実用的なパートナーロボットには至っていません。 その理由の一つとして、環境の変化に適応して運動することが難しいということが挙げられます。 そこで本研究では、PLLを用いて外部信号に適応したロボット(図1)の運動軌道を生成する手法を提案しています。 PLL(Phase Locked Loop)とは、入力された二つの信号の位相を一致させる手法です。 本手法の以下の3つの部分で構成されています(図2)。
- 入力部:外界からの信号をセンサで取得し、必要に応じてノイズ除去や波形整形等の前処理が行われます。
- PLL部:入力部からの外部信号と、運動軌道生成部からのフィードバック信号が入力され、2つの信号の位相同期が行われます。
- 運動軌道生成部:目標周期とPLL部からの目標位相が入力され、この2つを基にフーリエ級数近似式を用いて任意の周期運動が生成されます。
- 同期対象とする人間の運動の振幅にばらつきがある場合、生成する運動軌道が歪む
- 同期対象の運動が不可視状態の場合、生成する運動軌道が歪む、同期しない
参考文献
- 舘野晴彦, 琴坂信哉, 大滝英征, ''PLLを用いた適応的運動軌道生成'', 第23回日本ロボット学会学術講演会, 2005.