ザトウグモ型6脚歩行ロボット ASURA 1号機
Harvestman-like hexapod walking robot: ASURA-I
解説図・実験写真
-
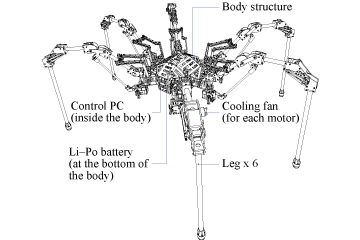
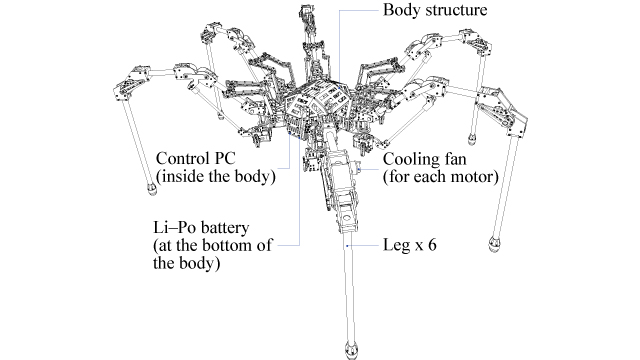
図1:3D-CADモデル
ザトウグモを規範とした形態
-
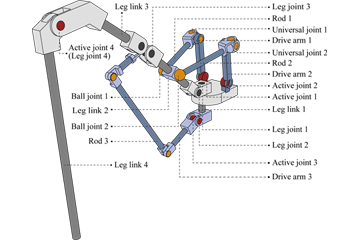
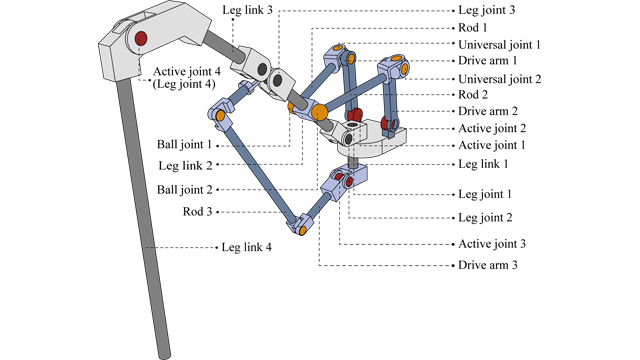
図2:脚機構設計
干渉駆動機構、パンタグラフ機構、二重関節(Joint3)・オフセット関節(Joint4)を導入
-
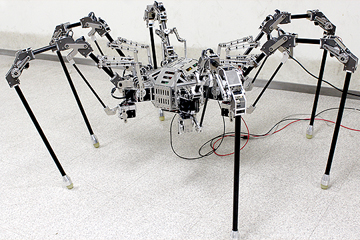
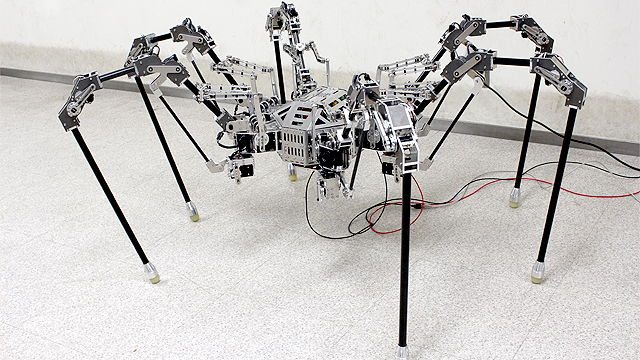
図3:プロトタイプ
開発した試作機
研究概要
歩行ロボットによる不整地歩行を想定した場合、脚形状は胴体の外側に張り出す昆虫型とし、 脚は可能な限り長くその可動範囲を広げることが望ましいことが以前から指摘されてきました。 しかしながら、アクチュエータ性能の不足、脚剛性の不足などの理由から、 これまでの歩行ロボットは小型であっても胴体に対し長い脚が実現できていませんでした。 そこで本研究では、自然界において長い脚を有し高い不整地踏破性を持つ虫である、ザトウグモを規範とした脚長体長比の大きいロボットを開発しています(図1)。 このようなロボットが実現すれば、身体的特徴により高い静的安定性と不整地踏破性能が期待できます。 そのためには、胴体から離れた位置で自重を支持できる出力を脚先で生成でき、広い可動範囲と高い剛性を有する高性能な脚の設計が要求されます。 これらの要求を満たすために、設計では以下の様な工夫がなされています(図2)。
- 部材の一部にCFRPを用いることによる脚全体の軽量化と慣性モーメントの抑制
- 差動機構の一種である干渉駆動機構による高効率・高出力化
- パンタグラフ機構を導入し、支持リンク系と駆動リンク系を分離することによる高剛性化
- 二重関節とオフセット関節の導入による必要可動範囲の確保
参考文献
- Ryuichi Hodoshima, Yoshikazu Ohura, Yuki Nishiyama, Akihiro Sakaki, Soichiro Watanabe and Shinya Kotosaka, ''The ASURA I harvestman-like hexapod walking robot: compact body and long leg design,'' Advanced Robotics, Vol.30, No.23, pp.1467-1483, 2016.
- R.Hodoshima, S.Watanabe, Y.Nishiyama, A.Sakaki, Y.Ohura and S.Kotosaka, ''Development of ASURA I: Harvestman-Like Hexapod Walking Robot -Approach for Long-Legged Robot and Leg Mechanism Design-,'' Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems 2013, WeAT13.5, 2013.
- 渡邊宗一郎, 西山雄輝, 程島竜一, 琴坂信哉, ''ザトウグモ型6 足歩行ロボットASURA I の開発 ―第4報:脚機構の解析と基本動作実験―'', ロボティクス・メカトロニクス講演会2013, 1A1-P10, 2013.
- 西山雄輝, 榊明裕, 瀬尾隆, 大浦義和, 程島竜一, 琴坂信哉, ''ザトウグモ型6足歩行ロボットASURA Iの開発 第2報:基準歩容解析と構造設計'', ロボティクス・メカトロニクス講演会2012, 2A2-T02, 2012.
- 程島竜一, 大浦義和, 榊明裕, 西山雄輝, 瀬尾隆, 琴坂信哉, ''ザトウグモ型6足歩行ロボットASURA Iの開発 第1報:脚機構設計と脚駆動試験'', ロボティクス・メカトロニクス講演会2012, 2A2-T03, 2012.