ザトウグモ型6脚歩行ロボット ASURA 2号機
Harvestman-like hexapod walking robot: ASURA-II
解説図・実験写真
-
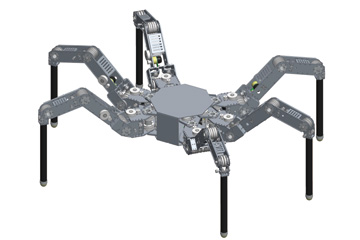
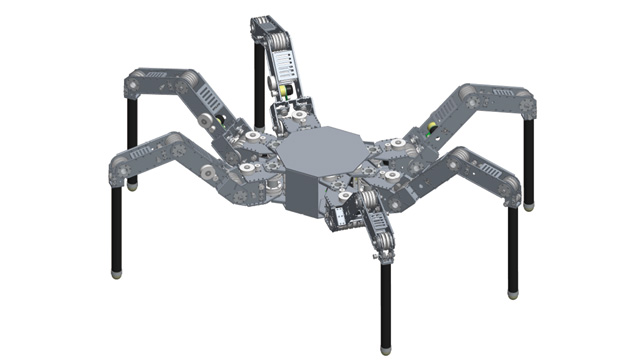
図1:3D-CADモデル
ザトウグモを規範とした長脚と小型胴体を有する形態
-
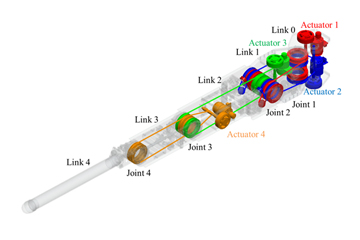
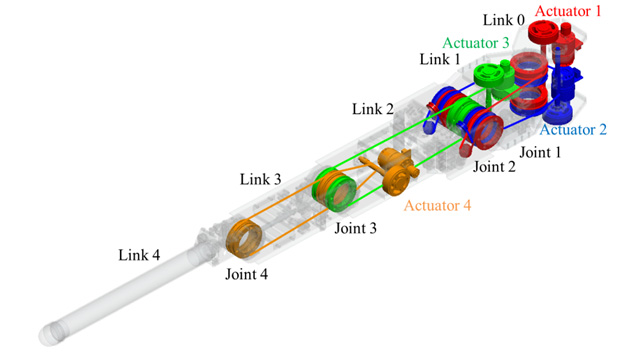
図2:脚機構設計
ワイヤ干渉駆動を導入し、スナッチブロックを用いた小型減速機による減速比の異なる差動機構を実現
研究概要
本研究室で継続的に開発を行っているザトウグモ型6脚歩行ロボットの試作2号機です(図1)。
関節可動範囲を大きくすることで,多様な姿勢を選択することができ,様々な不整地に対応することを目標にしています。
広範な関節可動範囲を確保するために,脚駆動系には二重干渉駆動と呼ぶ新たな機構を採用しました。
具体的には図2に示すように、高強度化学繊維ワイヤを用いて、スナッチブロックを用いた減速比の異なる差動機構と連結差動型干渉駆動を複合し、脚先で大きな支持力を生成することを実現しました。
参考文献
- 浦川瑞生,片山龍太,程島竜一,琴坂信哉, ''ザトウグモ型 6 脚歩行ロボット ASURA2 号機の開発―第 1 報:二重干渉駆動による脚機構設計―'', ロボティクス・メカトロニクス講演会2022, 2A1-Q04, 2022.
公益財団法人JKA 研究補助の概要
公益財団法人JKA 2023年度研究補助の概要はこちら