2023年度JKA補助事業
岩壁や構造物の近接調査技術を高度化する6脚ロボットおよび
ワイヤ牽引型自重補償システムの開発
Harvestman-like hexapod walking robot: ASURA-II
解説図・実験写真
-
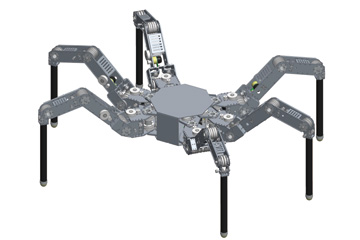
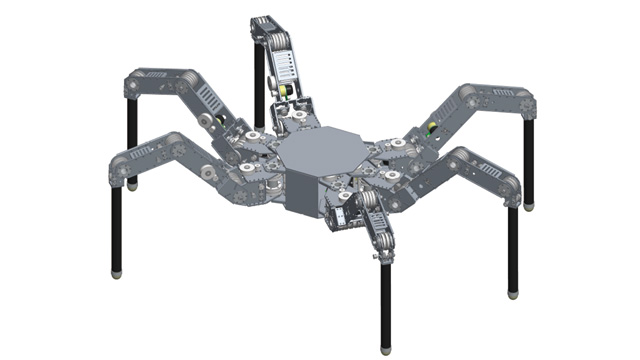
図1:開発するロボットの3D-CADモデル
ザトウグモを規範とした長脚と小型胴体を有する6脚歩行ロボット
-
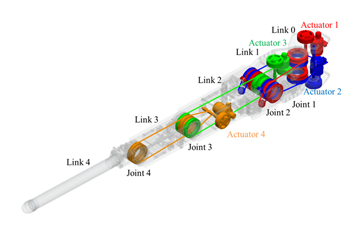
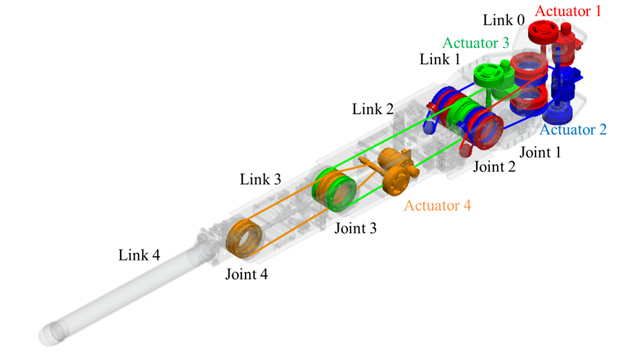
図2:脚機構設計
ワイヤ干渉駆動を導入し、スナッチブロックを用いた小型減速機による減速比の異なる差動機構を実現
研究概要
山間地の多い日本では岩壁の安全調査の需要は高いが、それらは望遠による遠隔調査やロープを用いた作業員の近接目視により行われる。
また、都市部でのビル等のインフラ点検においても作業員が直接現場にアクセスし近接調査が行われる。
これらの調査技術は国土交通省にも認可された技術であるが危険な作業であり、安全を確保し作業効率の向上が喫緊の課題となっている。
さらに、専門技術員を育成するコストも大きな問題となっている。
そこで、6脚ロボットをワイヤで牽引することで凹凸のある壁面を自在に移動するロボットを開発し、作業員の代わりに近接調査を行うロボットシステムを構築し、その導入により近接調査の安全性や効率を向上させるだけでなく、省人化を促し後継育成の課題も解消する。
そのためにロボットの機構設計、センサシステム開発、運動制御法の確立をそれぞれ行う。
具体的に行う研究内容は以下の通りである。
- 高強度繊維ワイヤによる二重干渉駆動による脚機構
脚機構を長くすることで段差踏破性能や歩行安定性を向上させる。 高強度繊維ワイヤと複数のアクチュエータによる干渉駆動系により、可動範囲が広く脚出力の大きい脚機構を開発する。 - 不整地での歩容パターン生成法
凹凸のある不整地を効率よく移動可能にするグラフ理論を応用した歩行計画手法を開発する。 実時間での歩行計画を可能とする高速歩容パターン生成手法、路面の高低に対応できる三次元歩容パターン生成手法を検討する。 - 脚ロボット特化型SLAM
現状の車輪ロボットを前提とした環境認識技術であるSLAM技術を脚型ロボット向けに発展させる。 具体的には脚接地点のずれ、脚の撓みによる胴体姿勢の変化などによる脚型ロボット特有のSLAMの課題を解決する。 - 不整地踏破性能の高い6脚ロボット
これまでに開発してきた各要素を統合して不整地踏破性能の高い6脚ロボットを開発する。 また不整地踏破性能を高めるため胴体を小型化し、凹凸路面に接地可能な胴体構造にすることで、従来のロボットにない胴体を活用した移動を可能にする。 - ワイヤ式自重補償システム
脚機構にも導入した高強度繊維ワイヤと力制御可能な巻取りウィンチ機構を用いて、急斜面でロボットを牽引する自重補償システムを開発する。 これにより壁面を移動可能にする。
研究背景
山間地の多い日本では岩壁や急崖の安全調査の需要は常に高いが、それらは専ら望遠による遠隔調査やロープを用いた作業員の近接作業により行われる。
また、近年増加している都市部でのビルや橋梁等のインフラ点検も、同様にロープを用いた作業員の近接作業により行われる。
これらの調査技術は国土交通省にも認可されている期待の大きい技術であるが、本質的に危険な作業であり滑落等の労働災害をいかに防止し、作業効率をいかに向上させるかが大きな課題となっており、同様に専門技術員を育成・確保するコストや時間も喫緊の問題となっている。
山間部の岩壁の安全度調査や都市部のビル等のインフラ点検を高度化するべく、ワイヤ牽引することで斜面を縦横自在に移動可能な6脚ロボットの基盤技術を開発する。
そのために、6脚ロボットの不整地踏破性能を向上させる機構、運動制御、センサ技術と、力制御されたワイヤによる重力補償システムの研究開発を行う。
研究内容
(1)高強度繊維ワイヤ駆動系を用いた可動範囲が広く高出力な脚機構の開発に関する研究
脚長の長い脚機構を開発するためには、大きな負荷トルクが加わる脚先から最も遠い、つまり胴体近接の関節が大きなトルク生成機能を有する必要がある。そこで、複数のアクチュエータを協調駆動させることで大トルクを生成しつつ駆動効率も向上させる従来の干渉駆動を発展させた二重干渉駆動を考案し、開発する脚機構に導入した。 また、高速な遊脚運動と強力な支持脚運動を両立するため、スナッチブロックを用いたワイヤ差動機構も検討し、脚機構に導入した。 次に、アクチュエータトルクとプーリ径を最適化するため、脚先出力とアクチュエータ出力の関係を調査する静力学解析を行い、必要なアクチュエータトルクを求めた。 これらの設計手法および解析から、脚機構の設計を行い、高強度繊維ワイヤであるザイロンHMを用いて、単脚機構を試作した。 次に、支持脚運動時の自重による脚機構への負荷を再現できる歩行模擬試験台を開発し、歩行動作を想定した模擬試験を行った。 試験の結果、脚機構が想定した基準歩容を実行できる性能があることを確認した。
(2)自立移動可能な6脚歩行ロボットの開発に関する研究
本研究で提案する長脚と小型胴体を有する6脚歩行型ロボットの実験機を開発した。
まず、脚機構としては、(1)にて性能を確認した単脚機構を複数開発し導入した。
次に新たに小型胴体、搭載する制御システム、電源システムを設計し、それぞれ開発した。
小型胴体では、小型で頑強な構造を実現するためラーメン構造とし、脚長の1/3以下となる小型な胴体を実現した。
制御システムでは、上位層、下位層の二層構造からなるシステムアーキテクチャを採用し、リアルタイム性と高い処理能力を両立させると共に、システム変更が容易な構成とした。
電源システムは、ロボットの稼働時間が一時間程度になるようにバッテリ容量を選定した。
加えて、不整地での安定性および胴体を用いた極めて安定な歩行を実現するために、胴体を接地可能とさせる対地適応型接地機構を設計し試作した。
スコット・ラッセル機構を導入することで、接地脚先の垂直変位を接地脚根本の水平変位に変換し、ワイヤを用いた連結差動機構で接地脚根本を連結することで、全ての脚が連動する。
この機構により不整地の凹凸に接地脚が適応することを可能にした。さらに不整地の小さな凹凸にも対応するため、接地脚先にはロッカーボギー機構による足裏機構をそれぞれ導入している。
開発の検証として、6脚歩行ロボットの標準的な歩容であるトライポッド歩容による歩行実験を行った。
実験では、開発したロボットがトライポッド歩容を安定して行えていることが観察でき、ロボットの基礎開発が行えたことを確認した。
(3)不整地を歩行するためのグラフ理論を用いた歩容パターン生成手法の開発に関する研究
多脚歩行ロボットが不整地を歩行するためには、適切な遊脚および脚接地点、重心移動量などを決定する必要がある。 これらの選択肢は膨大なものとなるため、グラフ理論を用いた歩容パターン生成手法をこれまでに提案し研究を行っている。 ロボットの状態をグラフ理論におけるノード、同様に歩行動作をエッジで表現することで、グラフを構築しこのグラフを探索することで数動作先まで考慮した歩容生成が可能である。 本研究では、ロボット重心の位置や姿勢の変更を考慮した歩容パターン生成を検討することで、斜面や大規模段差における歩容生成を可能とした。 シミュレーションおよび小型実験機を用いた実験を行い、斜度15度シミュレーションにおいて脚長の66%の大規模段差の踏破、および実験において脚長の51%の大規模段差の踏破に成功した。 次に、グラフ探索における探索時間を削減することで、リアルタイムでの歩容生成を目指した。予め、歩容パターン生成時に実際にロボットが選択する頻度が少ないグラフ階層を削除することで探索空間、つまり探索時間の削減を行った(図12)。シミュレーションにおいて平均で50%程度探索時間を減少できたことを確認し、小型ロボット実験機による実験により三次元環境にてリアルタイムで歩行できることを確認できた(図13)。
(4)歩行ロボット用環境認識技術SLAMに関する研究
移動ロボットが未知の不整地環境を移動するためには、リアルタイムで移動環境の地形情報を取得し、自己位置を同定する必要がある。
この地図情報と自己位置同定の問題に関しては、SLAMと呼ばれる手法が従来用いられてきた。
このSLAMでは、外界センサと内界センサを融合することで手法の信頼性を向上させる方法が用いられるが、それはオドメトリが容易な車輪やクローラロボットに限られてきた。
そこで、本研究では多脚歩行ロボットに特化させた信頼性の高い内界センサによるオドメトリ手法を開発し、内界センサと外界センサを融合することによる信頼性の高いSLAM手法を開発することとした。
この内界センサ(角度センサ)による脚型ロボットのオドメトリに関しては、脚先の滑りや脚構造の撓みによる制御できないロボットの重心位置・姿勢の変化誤差をロボットに加わる力とモーメントの釣り合い式を解くことで求めることにより確立することとした。
これに外界センサによる従来のSLAM手法を融合することで、脚型ロボットにおける信頼性の高いSLAM手法を開発した。
そして、小型実験機を用いた実験により、提案したSLAM手法の有効性を確認した。外界センサのみによるSLAMでは作成した地図情報の一部に欠損が確認できるが(図15)、内界・外界センサ融合によるSLAMで作成した地図情報は正確であることが実験結果より確認できた(図16)。さらに自己位置同定の結果も内界・外界センサ融合方式がより精度が高いことを確認した。
(5)ワイヤ牽引式自重補償システムに関する研究
移動ロボットが崖面や急斜面など通常は移動することが困難な難所を移動する時に、ワイヤで移動ロボットを支持する方法がある。
しかし、これまでの方法では、移動ロボットの移動に制限がある、移動範囲が狭い、移動環境の障害物によりワイヤ動作が阻害される、重量増加によりロボットの移動能力が低下する、汎用性が低い、などの問題があった。
そこで、本研究ではこれらの問題を解決するワイヤ式移動支援装置を設計した。
提案するシステムは対象となる移動体が崖面上を移動できるように、ウインチ機構による巻取・放出される二本のワイヤにより構成されている点が特徴であり、水平に展開する左右移動用の環状循環型ワイヤと、このワイヤと垂直になるように斜面方向に展開する上下移動用の動滑車型ワイヤで構成されている点が特徴である。
これにより、原理的にはシステムの消費エネルギを著しく抑えることが可能である。
このシステムを実現するために、ワイヤを巻取り放出するためのウインチ機構、ワイヤを常に鉛直方向に展開するためのワイヤガイド用移動装置を設計した。
さらに、このワイヤ式移動支援システムを適切に運用するための三連プーリとロードセルを用いた張力計測センサ、角度センサを用いたワイヤ放出方向計測センサ、システムの制御ブロックを検討し、小型実験装置により制御アルゴリズムの有効性を検証した。
本研究が実社会にどう活かされるか一展望
本研究の成果は、将来的には、人の立ち入りが困難な難所における崖面や急斜面における崩落や地滑りなどの危険度調査に導入することができる。 また、橋梁や高層ビルなどの都市型インフラ、あるいはダムや法面などの郊外型インフラの老朽化調査、他にも法面を安定させるロックボルト工法やダム等のグラウト工事などの土木工事のための事前調査への応用が可能であり、省人化・安全化を促す革新的な技術になり得る。 6脚歩行ロボットシステムは単独でも運用できるフィールドロボットシステムである。 郊外における自然環境や災害現場等における調査作業、山林地帯における保全作業、など少子高齢化が指摘されて久しい日本社会において、困難な作業の省人化・機械化を図ることができる。 人とロボットがその役割を相互補完し、人とロボットの連携を促す試みにも成り得るフィールドロボットシステムに成長できると期待できる。 次に、ワイヤ牽引式自重補償システムは、崖面や急斜面で活躍を期待されるロボットの行動範囲を著しく拡大できるだけでなく、原理的には長時間の運用も可能にする。 ドローンのような航空ロボットでは作業困難な状況において、地上移動ロボットを活躍させることができる。 さらに、ロボットだけでなく、作業員などの人間にも適用可能な技術であり、現状の人力で行われている難所での工事に携わる作業員の労働環境を著しく改善することが可能である。 他にも、産業などへのアプリケーションだけでなく、遊戯施設などでのアトラクションなどアミューズメント用途にも応用可能であり、多分野への応用が期待できる。
本研究にかかわる知財・発表論文等
安部拓真,浦川瑞生,松本直幸,程島竜一,琴坂信哉,“ザトウグモ型6脚歩行ロボットASURA2号機の開発―第2報:単脚機構による歩行模擬動作実験―”,第24回計測自動制御学会システムインテグレーション部門講演会,3F5-03,2023.
謝辞
2023年度 競輪補助事業
この事業は、競輪の補助を受けて実施しました。




