トカゲ型移動ロボット SAURUS I
Lizard-like mobile robot: SAURUS I
解説図・実験写真
-
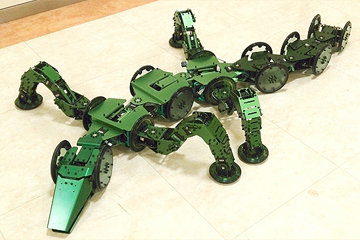
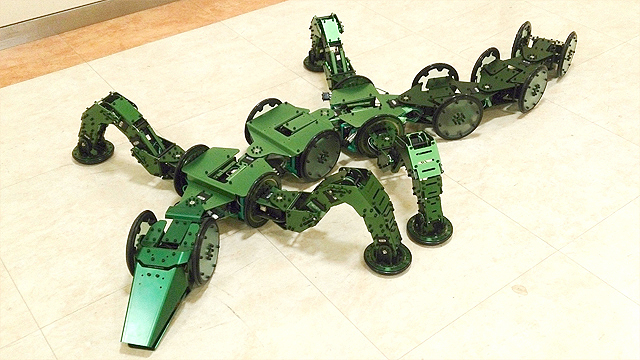
図1:ロボット試作機
トカゲを規範とした形態
-

図2:安定な移動
尻尾の揺動により動的安定性の向上
-

図3:安定な作業
尻尾を5本目の足として活用した段差乗り越え動作や作業時の安定した足場の確保できる
-
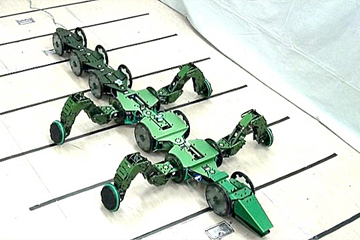
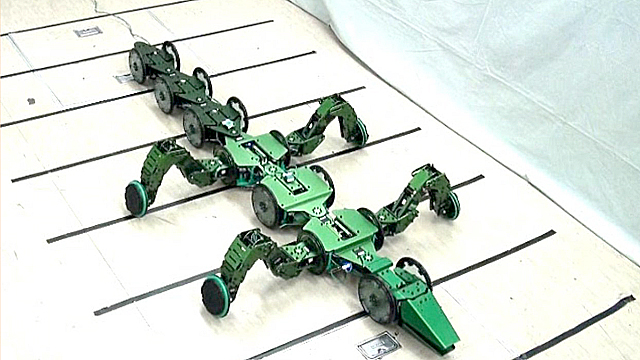
図4:複数の移動形態
複数の形態で移動を行うことができる


研究概要
移動作業ロボットでは軽量化が大きな課題となっているため、移動と作業の機能を統合したロボットが開発されてきました。 そこで本研究では、この移動と作業の機能を統合するという概念を取り入れ、これまで生物学的な観点からのみ研究されてきたトカゲ型ロボットを工学的観点から再考し、 移動作業ロボットとしてのトカゲ型ロボットを開発しています(図1)。 トカゲ型の形態が移動作業に適している理由は以下の通りです。
- 体幹を屈曲させることで大きな歩幅での移動や重心制御による高い静的・動的安定性が実現できる(図2)
- 尻尾を5本目の足として活用することで段差乗り越えや作業を行う場合に安定性を向上させることができる(図3)
- グリッパとして頭部や尻尾を活用し様々な作業を遂行できる(図3)
- 複数の移動形態(歩行、ヘビのような蛇行推進、ローラーウォーク)を選択できる
参考文献
- 黒須弘稔, 石井宏知, 程島竜一, 琴坂信哉, 天野久徳, ''トカゲ型移動ロボットSAURUS Iの開発'', 第15回計測自動制御学会システムインテグレーション部門講演会, 1H3-3, 2014.
- 石井宏知, 黒須弘稔, 程島竜一, 琴坂信哉, ''トカゲ型移動ロボットSAURUS Iの開発 第1報:移動作業指向のトカゲ型ロボッ トの提案'', ロボティクス・メカトロニクス講演会2013, 1A1-P24, 2013.