クローラ可変型4足歩行ロボット TITAN X
Track-changeable quadruped walking robot: TITAN X
解説図・実験写真
-
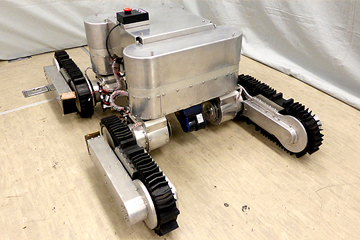
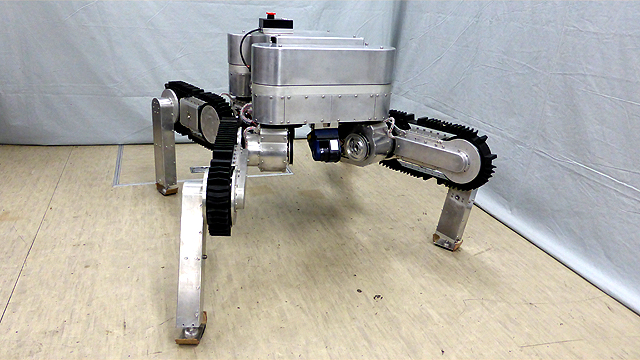
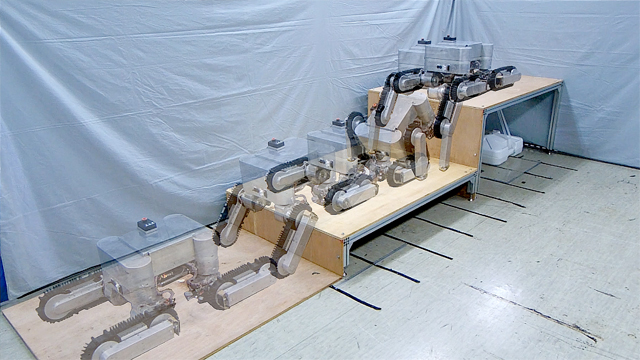
図1:クローラ形態
整地や軽微な不整地での移動に有利
-
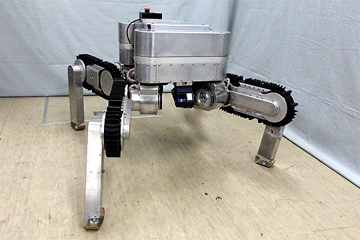
図2:脚形態
不整地での移動に有利
-
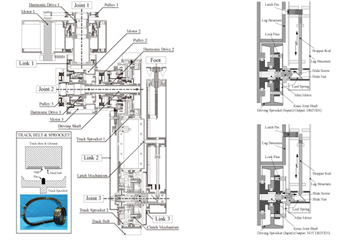
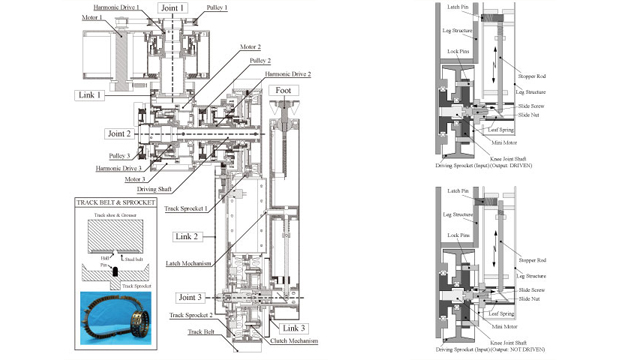
図3:脚機構設計
移動のためのクローラベルトを関節駆動用のタイミングベルトにも転用する
-
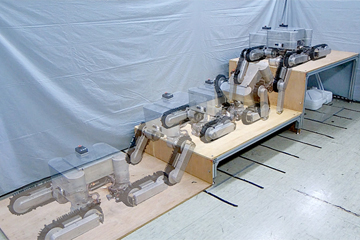
図4:脚クローラハイブリッド動作
クローラ機構単体のみでは踏破不可能な段差をも踏破可能にする

研究概要
クローラ可変型4足歩行ロボットとは歩行運動とクローラ推進運動の2状態が切り替えられるクローラ可変型4足歩行ロボットである(図1、図2)。 多くの移動環境で高い踏破性を発揮する歩行ロボットと、凹凸のある悪路でも高い機動力を発揮するクローラロボットの両特性を複合すれば、不整地に柔軟に対応できる。 そこで、歩行ロボットにクローラを組み合わせた形態がこれまでもいくつか提案されていたが、単純な組み合わせでは脚が重くなりすぎ歩行性能を制限していた。 これに対し、クローラ可変型4足歩行ロボットは動力伝達系に特別なクローラベルトを導入し、脚駆動のための動力伝達ベルトをそのまま利用してクローラ推進することが可能である。 図3に示すように、歩行からクローラへ切り替わる動作が、脛部分を腿部分の外側面に固定し、脛部分を膝関節から分離することで実現されている。 これにより脛駆動用ベルトをクローラ推進用ベルトに転用することができ、軽快な運動性能だけでなくクローラ推進機能も併せ持つ脚を実現している。 開発したクローラ可変型4足歩行ロボットは全長900mm、全幅600mm、重量29kgである。 クローラ可変型4足歩行ロボット2状態を切り替えられるだけでなく、脚とクローラの特性を複合させた運動も行える移動体である。 図4に示すような脚やクローラのみでは乗り越え不可能だった大規模段差の乗り越えなどを可能とする運動計画の作成を行うことにより、脚・クローラ複合動作による移動性能の向上を目指す。
参考文献
- 程島竜一, 福村泰明, 天野久徳, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 -脚機構の基本設計と動作実験-'', 日本ロボット学会誌, Vol.28, No.7, pp.872-879, 2010.
- R.Hodoshima, Y.Fukumura, H.Amano and S.Hirose, ''Development of Track-changeable Quadruped Walking Robot TITAN X -Design of Leg Driving Mechanism and Basic Experiment-,'' Proc. of 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS10), WeCT10.2, pp.3340-3345, 2010.
- 程島竜一, 福村泰明, 天野久徳, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 –第2報:全体構成と基礎動作実験-'', 第27 回日本ロボット学会学術講演会, 1P2-06, 2009.
- 福村泰明, 程島竜一, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 第1報:クローラ可変型脚機構の設計'', ロボティクス・メカトロニクス講演会2007, 1A1-F04, 2007.