人間型ロボットの機構自由度の縮退を利用した動作
Motion generation for humanoid robot using singular configuration
解説図・実験写真
-
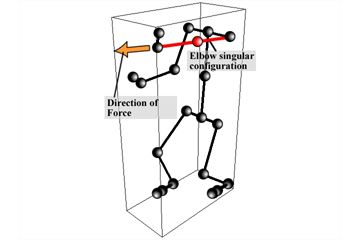
図1:縮退状態を利用した作業
人間は日常的に、肘をのばして押し動作を行います。
-
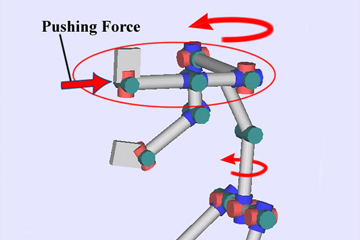
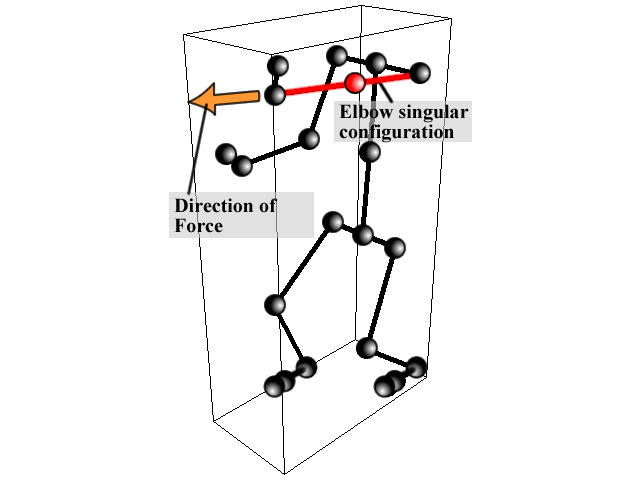
図2:アクチュエータの選択的利用による作業方法の提案
手首・肘関節の縮退により、それらの関節に大きな負荷を加えず体幹部の大出力アクチュエータにより大きな手先力を発生させます。

研究概要
近年、ヒューマノイドロボットに代表されるような数十自由度を持つ多自由度ロボットが実現可能になってきています。 しかし、自由度の利用という観点から見ると、従来のロボットマニピュレータと変わりがなく、多自由度であることを積極的に活用しているとは言えないのが現状です。 また、これらの多自由度ロボットは、人間が行なっているような作業を行わせるには、まだ手先発生力が不十分であるなどの問題点があります。 人間が行なう日常的な動作の中には、肘をのばして押し動作を行なったり、足を伸ばした状態で立位姿勢を維持したりといった動作が多く見受けられます。 例えば、図1のように、手のひらで押し動作を行なう場合、手首関節、肘関節を縮退させる事により、出力の小さな手首関節や肘関節に大きな負荷トルクを発生させる事無く、体幹部の大きな出力を持つ筋肉を用いて手先力を発生させています。 このような関節自由度の縮退を用いたアクチュエータの選択的利用は、多自由度ロボットシステムにおいてロボットシステムの持つ能力を最大限に活用するために非常に有用であると考えられます。 そこで本研究では、作業方向への関節縮退を利用したアクチュエータの選択的利用による作業方法を提案します。 本手法では、ロボットのリンク機構の自由度を積極的に縮退させることにより、負荷トルクを負担するアクチュエータを選択します。 例えば、出力の小さな関節を縮退させ、出力の大きな関節により手先出力を発生させる等の使い方が考えられます。 図2に関節縮退を用いてアクチュエータの選択的利用を行なった場合の模式図を示します。 図2では、手首関節、肘関節を縮退させることにより、それらの関節に大きな負荷をかける事無く体幹部の大出力のアクチュエータを用いて大きな手先押しつけ力を発生させています。 通常の肘を曲げた様な姿勢で作業を行う場合には、手首および肘関節の出力トルクが飽和する事が無いように手先押しつけ力を制限することが必要です。 しかし、両関節を縮退させることにより、手首関節、肘関節の出力飽和を考慮すること無く、手先押しつけ力を体幹部のアクチュエータで発生させることができます。
参考文献
- 琴坂信哉, 大滝英征, ''多自由度ロボットにおける機構自由度の縮退を利用したアクチュエータの選択的利用'', 日本ロボット学会誌, Vol.25, No.8, pp.115-121, 2006.