人間共存ロボットのリスク見積もり
Risk estimation for human-symbiotic-robot
解説図・実験写真
-
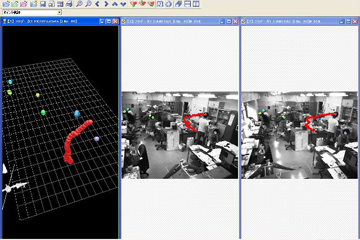
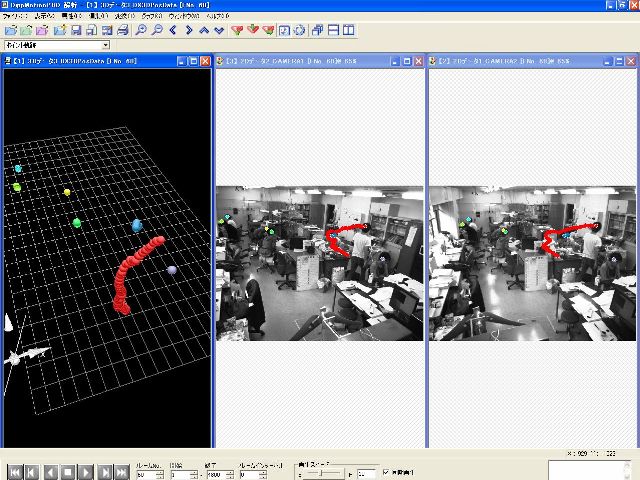
図1:運動解析の様子
ステレオカメラと動画解析ソフトを用いた人間の運動解析。
-
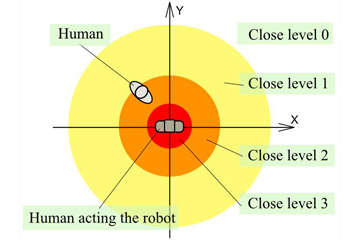
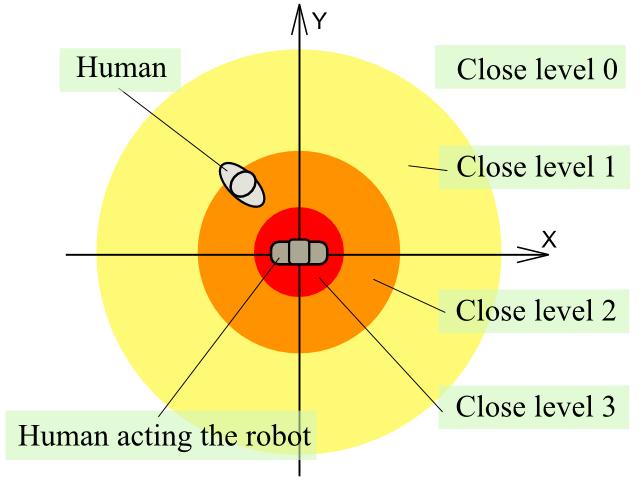
図2:接近度
接近の判定を行うために定義した接近度という概念
-
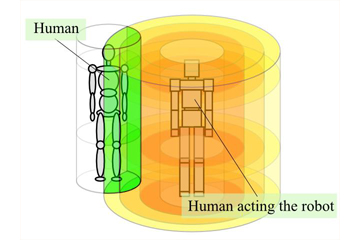
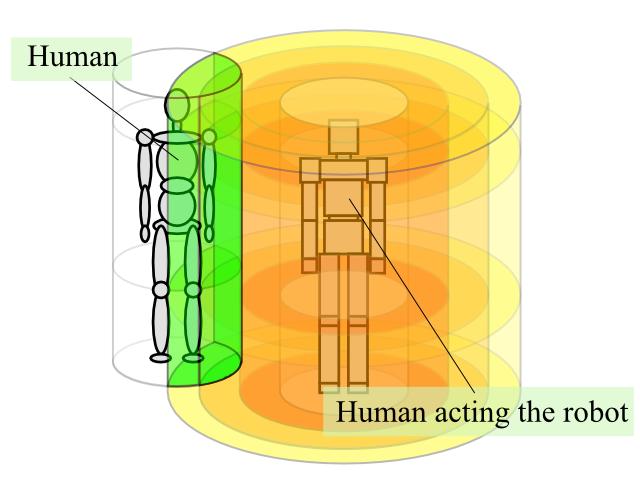
図3:周囲空間
接近時の危害発生確率の見積もりに利用する周囲空間
研究概要
近年、家事やサービスを行う人型のロボット、所謂、人間共存ロボットの活躍が期待されています。 人間共存ロボットは周囲に人間がいる状況の中で作業を行うため、人間と頻繁に接触することが予想されます。 そのため、事前にリスクアセスメントを施し、危険性を把握しておく必要があります。 そこで本研究では、人間共存ロボットが人間の生活環境内で作業を行う際に、衝突やはさみこみなどによって人間に危害を及ぼす確率がどの程度あるのか、ということを見積もる手法を考案しています。 実際にロボットを人間の生活空間に投入し、事故の統計データを取得することで危害の発生確率の見積もりは行えますが、危険を伴うため倫理的に問題があるといえます。 そこで本研究では、ヒューマノイドロボットが高度に発達すれば人間と同じように動作し、人間と同じように作業を行う、という想定に基づき、ロボットに見立てた人間の動作解析を行うことによって危害の発生確率を見積もる手法を提案しています。 衝突や挟みこみなどの危害は、人間とロボットが接近している時のみ発生しうるといえます。よって、危害の発生確率は、以下の2つの値によって表されると考えられます。
- ロボットが人間に接近する頻度
- ロボットと人間が接近している際における危害の発生確率
参考文献
- 家老将太, 琴坂信哉, 程島竜一, ''人間の動作解析に基づく人間共存ロボットのリスク見積り―周囲空間内における身体の存在確率による危害発生確率の評価―'', 日本機械学会ロボティクス・メカトロニクス講演会2010講演論文集, 2011.
- 琴坂信哉, 小柳玲央, ''人間の移動履歴に基づく人間共存型ロボットのリスク見積り―機械的危険源の危害の暴露頻度評価―'', 日本機械学会ロボティクス・メカトロニクス講演会2010講演論文集, 2010.
- 小柳玲央, 琴坂信哉, ''人間の移動履歴に基づく人間共存ロボットのリスク見積り'', 日本機械学会関東支部総会講演会講演論文集, 16th, pp.65-66, 2010.