滑空ヘビ型ロボット NURSE1号機
Gliding Snake-like Robot NURSE-I
解説図・実験写真
-

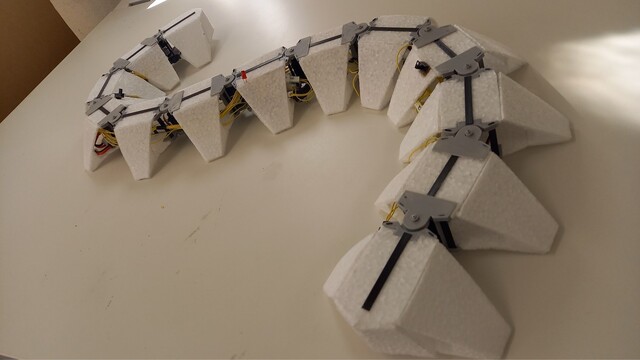
図1:滑空ヘビ型ロボット(試作)
軽量に開発したヘビ型ロボット
-
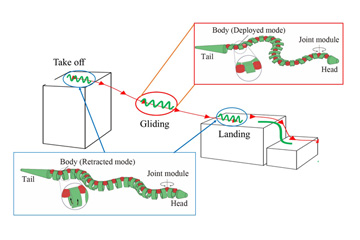
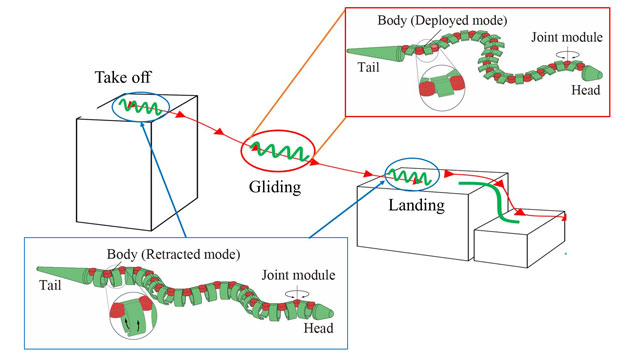
図2:ロボットの特性
滑空により広い活動範囲
-

図3:滑空実験
ロボットを空へ飛ばし、空中での特性を調査

研究概要
東南アジアには空中を滑空するトビヘビと呼ばれる特異な種が存在します。 トビヘビは身体を扁平形状に変形させて大きく蛇行することで滑空するヘビであり、トビヘビの滑空では蛇行する身体が形態可変な翼の役割を果たしています。 そこで本研究では、トビヘビの滑空運動の本質である蛇行運動による動的滑空に焦点を当て、実際に空中で蛇行運動が可能なヘビ型ロボットの開発を行っています。(図1)。 本研究で提案する滑空ヘビ型ロボットは、従来のヘビ型ロボットの滑走能力を損なわずに、滑空能力を付加したロボットです。 また滑空ヘビ型ロボット実現により、ヘビ型ロボット自体の移動性能向上につながることが考えられます。(図2) 滑空ヘビ型ロボットを開発するために滑空運動時の大きな屈曲を有する蛇行運動を実現するために,広い可動範囲を確保できる二重関節を導入することといたしました。 また機体重量を小さくするために胴体構造を凧のように梁と膜で構成いたしました。 滑空実験は地上7.3mから実施しており、射出装置により初速4.0m/sを与えております。(図3) 実験結果より滑空時の機体姿勢はロボットの重心と断面形状によって左右されることが明らかとなりました。
参考文献
- 髙木早人, 程島竜一, 琴坂信哉, ''滑空ヘビ型ロボットNURSE-Ⅰの開発―実験機の開発と滑空実験による基礎検証―'', ロボティクス・メカトロニクス講演会2020, 1A1-E10, 2020.
- 髙木早人, 程島竜一, 琴坂信哉, ''滑空ヘビ型ロボットNURSE 1 号機 の開発―第 1 報:滑空ヘビ型ロボットの概要と滑空特化型実験機の試作'', 第22回計測自動制御学会システムインテグレーション部門講演会, 3D1-05, 2021.