走行車両間のテザー懸垂移動装置を用いた屋外広域作業システム XPiDER
Far-reach tethered working tool between mobile platforms: XPiDER
解説図・実験写真
-
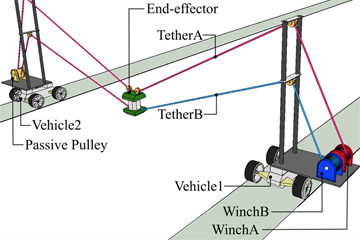
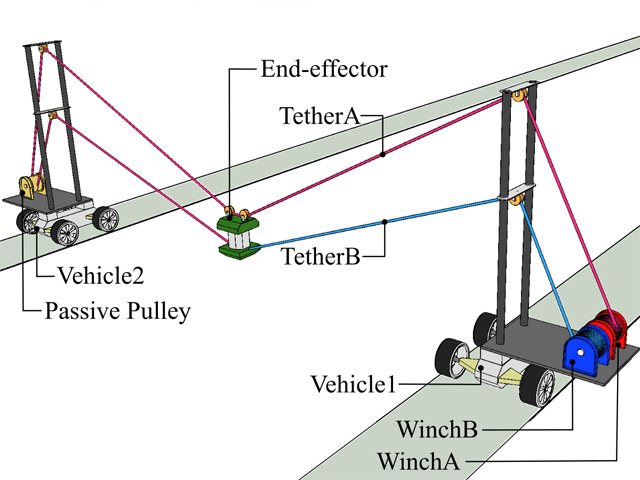
屋外広域作業システムの概念
並走する2台の走行車両、テザーを制御する2台のウィンチ、ループ構造のテザー懸垂により車両間を空中移動する作業装置
-
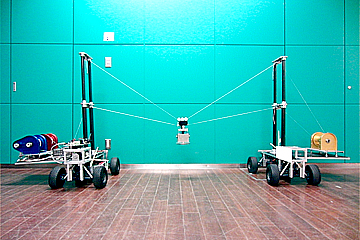
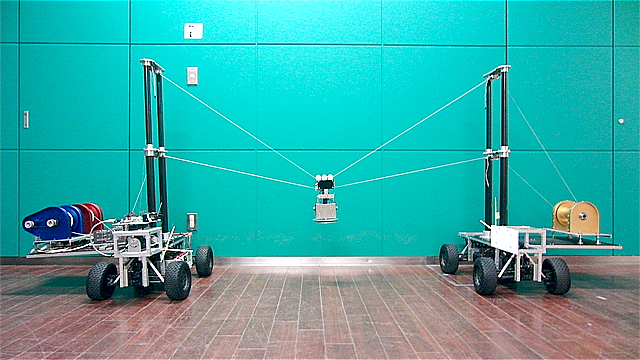
試作した実験システム
新たにウィンチ機構、作業装置を開発し、RC車両を改造した移動プラットフォームに搭載した
-

草刈り作業を模した実験
実際の草刈り地の凹凸に倣った作業装置の移動

研究概要
広大な土地における作業を省力化する目的でロボットを導入する試みが長年続けられています。
このような広域作業システムとして、従来は農業用GPSを用いた自動走行トラクタ、マルチコプターによる極限環境下でのモニタリング作業がありました。
しかし、自律走行車両やマルチコプターといった広域作業システムは、作業を行うための移動に多大な時間を要したり環境によっては移動そのものが困難になったりする場合があります。
この課題の解決方法として、本研究室では筆者らはパラレルテザー懸垂機構に注目し、2台の走行車とパラレルテザー懸垂機構により構成した広域作業システムを提案しています(図1)。
本システムでは、テザー懸垂機構は2台のウィンチ機構により車両間を上下左右に移動し走行車両自体も移動するため、空間を立体的に移動することが可能です。
屋外広域作業システムは以下の各要素から構成しています。
- テザー駆動システム:片側の車両に2台のウィンチを同軸に配置している。そしてウィンチの出力をクラッチ機構により連結すると2本のワイヤを1本の繋がった擬似的な閉ループ構造に切り替えることが可能となります。 この構成により、従来のパラレルテザーシステムで問題となっていた負のエネルギの発生を解消し、移動ロボットシステムでは重要な課題の一つであるエネルギ効率の向上が図れます。
- 並走する2台の車両:テザー張力を保つため、一定の距離を保ったまま並走します。 そのためリーダ・フォロワ型制御システムを採用し、搭載したレーザレンジファインダ(以下LRF)により、子機車両の位置・姿勢を推定し並走するよう制御を行います。
- テザー懸垂移動装置:テザーに懸垂され車両間を移動します。 用途毎に作業機を交換することで様々な作業を行うことができます。応用可能な広域作業として除草作業や農薬散布、地雷探査、地形データ取得等が考えられます。
参考文献
- 程島竜一, 下鳥宇宙, 望月恒星, 富永涼太, 吉田増大, 琴坂信哉, 福島 E. 文彦, 広瀬 茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第3報:テザー懸垂移動装置による草刈りシステムの構築と検証実験―'', ロボティクス・メカトロニクス講演会2018, 1A1-J07, 2018.
- 下鳥宇宙, 富永涼太, 望月恒星, 高橋康文, 程島竜一, 琴坂信哉, 福島 E. 文彦, 広瀬茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第2報:移動制御システムの構築と検証実験―'', ロボティクス・メカトロニクス講演会2016, 1P1-06b6, 2016.
- 望月恒星, 棚林祐一郎, 亀割拓, 程島竜一, 琴坂信哉, 福島E.文彦, 広瀬茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第1報:屋外広域作業システムの概要および実験システムの試作―'', 第33回日本ロボット学会学術講演会, 1K3-02, 2015.