恐竜型2足歩行ロボット TITRUS-III
Dinosaur-like biped robot: TITRUS-III
解説図・実験写真
-
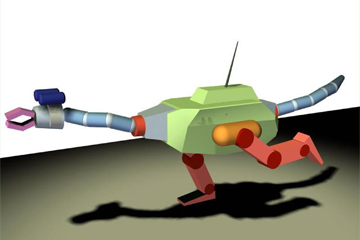
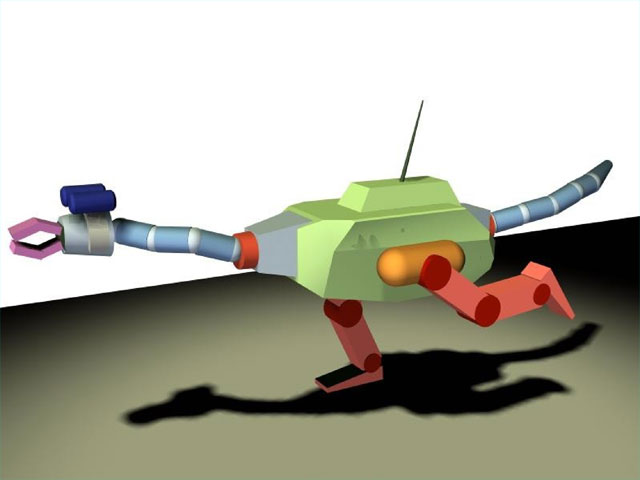
図1:高速な移動性能
首と尾でバランスを取ることで動的安定性を向上させる
-
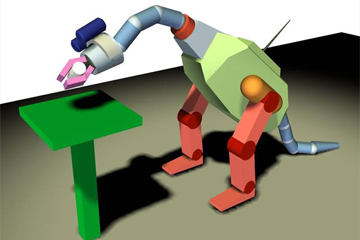
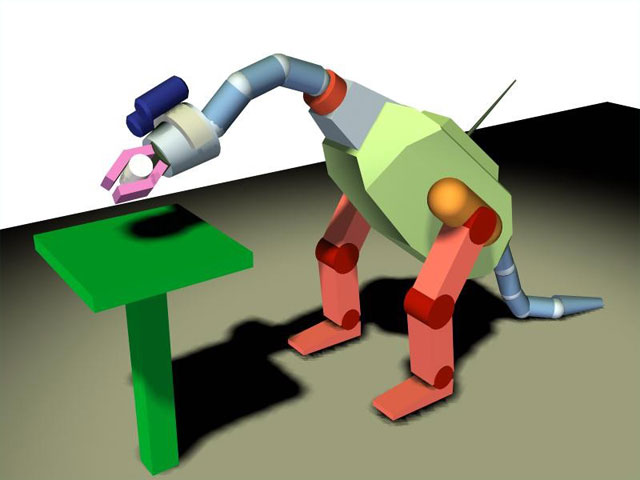
図2:安定な作業性能
首と尾をマニピュレータと第三の脚として使うことで静的に安定しながら作業できる
-
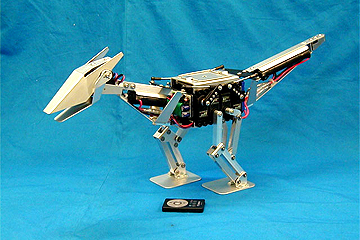
図3:プロトタイプ
RCサーボモータを用いたミニチュアモデル

研究概要
作業移動型二足歩行ロボットではヒューマノイドロボットが一般的ですが、人型は必ずしもこれに適した形態とはいえません。 たとえば、作業を行うときには不安定な二足の状態でバランスをうまく取りつづけなければならない、高速でダイナミックな歩行を行う場合には蹴り足によって発生するヨー軸回りのモーメントの制御が難しい、といった課題があります。 そこで本研究では次の特長を有する恐竜型二足歩行ロボットを提案し、機構設計、運動制御について研究を行っています。
- 首・尻尾を動吸振器として積極的に用いることで高い動的安定性を実現できる(図1)
- 尻尾を第三脚として利用することで作業に必要な安定した足場を築くことのできる(図2)
- 首をマニピュレータとして利用することで様々な作業に適用可能である(図2)
参考文献
- 程島竜一, 片山俊郎, 滝田謙介, 広瀬茂男: ''恐竜型2足歩行ロボットTITRUS-IIIの研究(機構解析と歩行運動の安定性評価)'', 日本設計工学会誌, Vol.50, No.4, pp.178-187, 2015.
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Dinosaur-like Robot TITRUS -Its Dynamics and The Motion Utilizing the Dynamic Effect of the Neck and Tail-, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas (2003)
- nsuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Dinosaur-like Robot TITRUS -The Efficacy of the Neck and Tail of Miniature Dinosaur-like Robot TITRUS-III-, 2003 IEEE International Conference on Robotics and Automation (ICRA2003), Taipei (2003)
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: The Efficacy of the Neck and Tail of Miniature Dinosaur-like Robot TITRUS-III, 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2002), Lausanne (2002)
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Miniature Dinosaur-like Robot TITRUS-III, 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2001), Hawaii (2001)
- Kensuke TAKITA, Ryuichi HODOSHIMA, Shigeo HIROSE:Fundamental Mechanism of Dinosaur-like Robot TITRUS-II Utilizing Coupled Drive, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), Kagawa(2000)