衝撃力軽減動作
Contact force reduction motion
解説図・実験写真
-
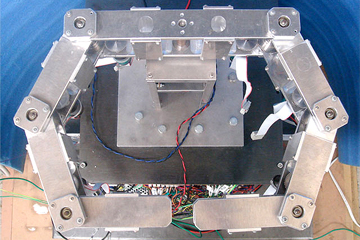
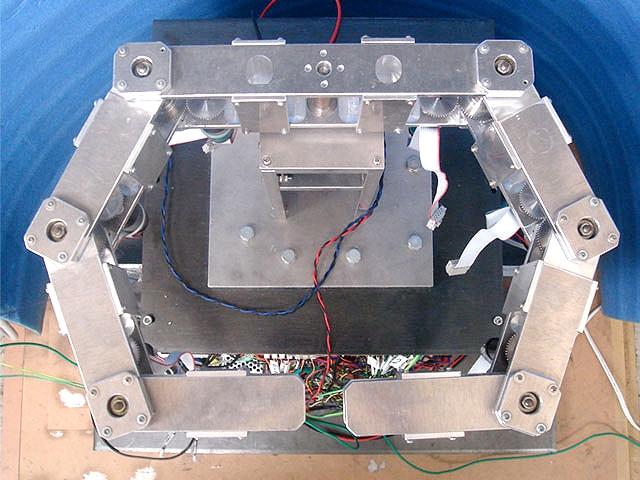
図1:平面7リンクマニピュレータ
平面7リンクマニピュレータ
-
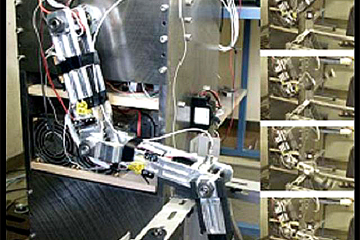
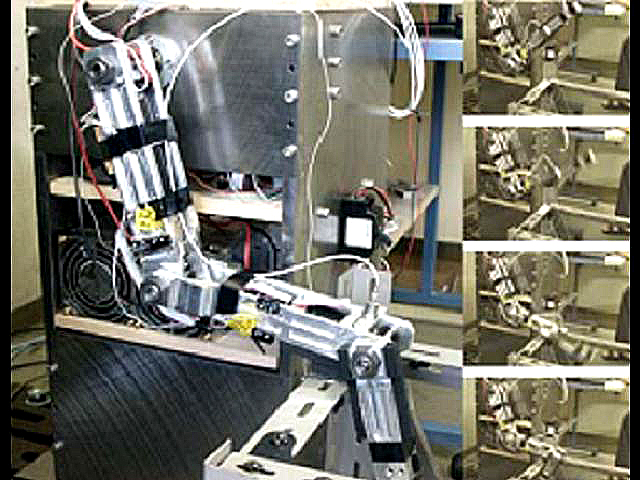
図2:鉛直面3リンクマニピュレータ
鉛直面3リンクマニピュレータ
-
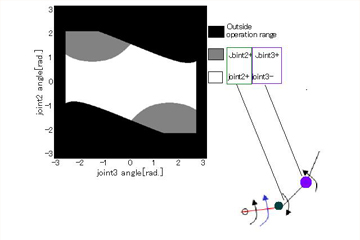
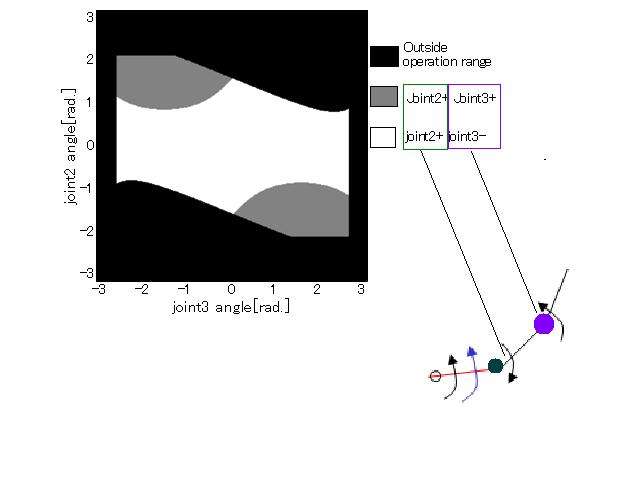
図3:関節トルク組み合わせ分布
オフラインで算出した関節トルク組み合わせ分布
研究概要
近年、人間と作業環境を共有するロボットが開発されるようになってきました。 それに伴い、衝突に対する安全対策の重要性が高まっております。 もちろん、衝突が回避できれば良いのですが、回避できない場合をも考える必要があります。 従来、衝突後の対策は、緊急停止もしくは、関節コンプラアンス等による方法が大半で、高速での衝突に対応した対策ではありませんでした。 そこで本研究では、衝撃力軽減のアプローチの一つとして、積極的にロボット自身を動かすことにより衝撃力を軽減する手法の提案を行っております。 図1の双腕7リンクマニピュレータや、図2に示したような高角加速度を実現できる3リンクマニピュレータや用いて研究を行っております。 (1)相互慣性力の利用 マニピュレータの動作時に発生する各リンク間の相互慣性力を活用して、衝突リンクを高加速度で減速する手法です。 相互慣性力は、各リンクの姿勢に依存して決まりますが、図3のようにあらかじめオフラインで算出しておくことにより、十分に短い時間で発生すべき関節トルクの組み合わせを得ることが可能です。 3リンクマニピュレータでの実験で効果が実証されており、現在、7リンクマニピュレータへの拡張を行っております。 (2) 相互慣性力による高加速度減速手法は、万能ではありません。 衝突リンクを挟んで前後に十分な自由度があることが必要です。 そこで、ロボットの手先が衝突する場合を対象として、Jeong、髙橋らにより提案された最適ブレーキ手法を活用させて頂き、簡略化最適ブレーキ手法を開発しました。 本手法は、Jeongらの提案するような最適性は無いのですが、計算量を大幅に削減しており、衝突時に素早く対応することが可能です。 衝突現象は、非常に短時間(数ミリから数十ミリ秒)の現象のため、計算時間が短いことも重要なのです。 (1)で紹介した相互慣性力を用いる手法と合わせて、衝突の状況に合わせて適切な衝撃力軽減手法を選択する手法や、その7リンクマニピュレータへの実装を行っております。
参考文献
- 琴坂信哉, 後藤大輔, 大滝英征, ''マニピュレータ衝突時の安全性向上へのアプローチ'', 日本機械学会ロボティクス・メカトロニクス講演会2007講演論文集, 2007
- 琴後藤大輔, 琴坂信哉, 大滝英征, ''緩衝材と相互慣性項の利用によるマニピュレータ衝突時の衝撃力軽減'', 日本機械学会関東支部第12期総会講演会 日本機械学会関東支部第12期総会講演会論文集, pp.277-278, 2006
- 菊池太季, 琴坂信哉, 大滝英征, ''衝突時の衝撃力の予測に基づいた平面3自由度マニピュレータの衝撃力軽減動作'', 日本機械学会関東支部ブロック合同講演会2004宮代 ブロック合同講演会2004宮代講演論文集, pp.233-234, 2004