扁形生物型メッシュロボット WORMESH-I
Flatworm-like mesh robot WORMESH-I
解説図・実験写真
-
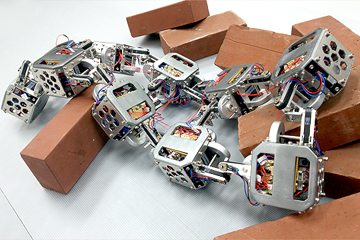
図1:不整地での移動
不整地上での移動も可能
-
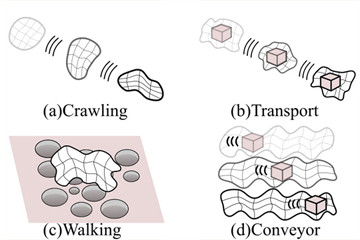
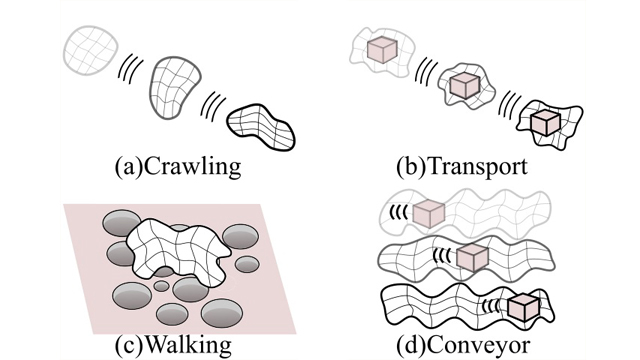
図2:ロボットの特性
様々な環境で移動や作業が行える
-
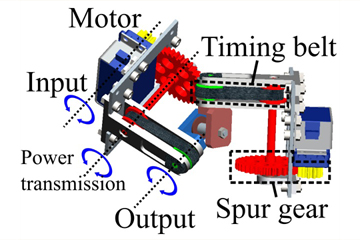
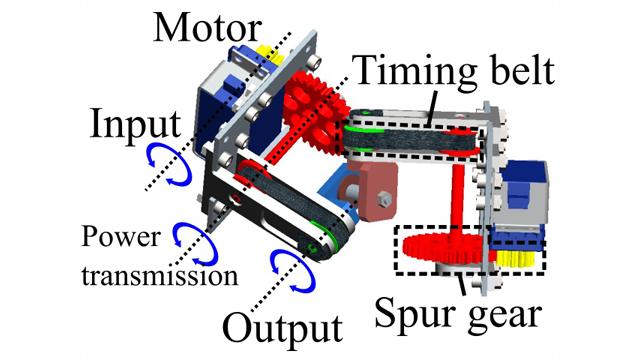
図3:関節機構設計
能動自由度2+受動自由度1で構成した関節
-
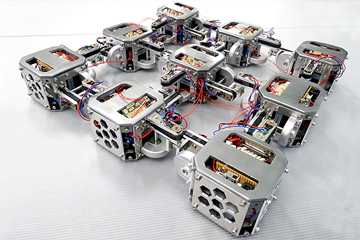
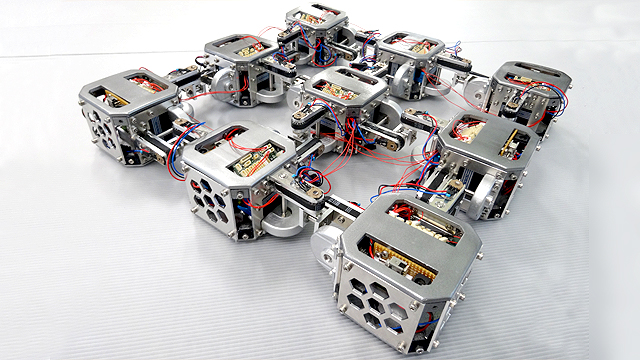
図4:ロボット試作機(正方形構成)
RCサーボモータを用いたロボット試作機(3×3ユニット)
-
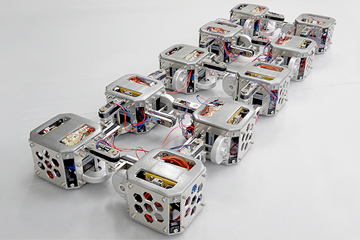
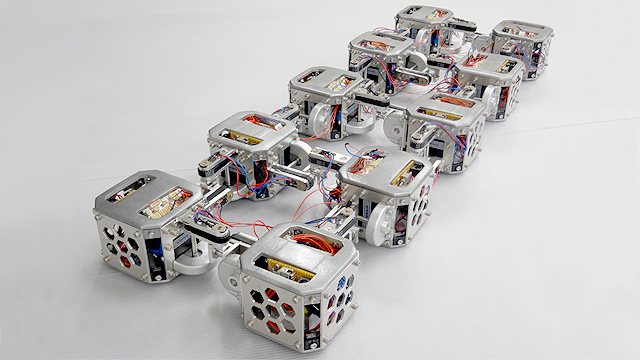
図5:ロボット試作機(長方形構成)
RCサーボモータを用いたロボット試作機(5×2ユニット)

研究概要
ヘビやミミズが手足を有していないにも関わらず蛇行や遊泳が可能なことから多くのヘビ型ロボットが開発されてきました。 そこで本研究では、ヘビやミミズなどの紐状ではなく、面状の体を有する扁形動物に着目しその移動メカニズムや身体特性、環境適応力を機械モデルで実現することを目的としています。(図1)。 本研究で提案するメッシュロボットは、二次元平面にモジュールを連結した上で、多方向への立体的な運動生成を可能にした点が先行研究と大きく異なる点です。 また二次元平面状にロボットを構成することで、移動体としてだけでなく作業体としても応用が考えられます。(図2) 板状機能体を開発するために複雑な自由度配置についての知見が必要となりました。 そこで図3に示すような動力学シミュレーションの結果を設計にフィードバックすることで開発を進めました。 最終的には体節を3自由度の関節で縦横に複数連結した構造とし、全体の能動自由度は24となりました。 特に3自由度の関節の2自由度を能動とし、1自由度を受動としているのが特徴です。 これまでに動力学シミュレーションにより基本的な移動方式である「Pedal-wave推進」、「Loop-gait推進」、「Gliding推進」を確認しています。 設計した関節が図4になります。 関節機構には1段目に歯車、2段目にタイミングベルトを用いた2段減速機構を導入しています。 これによりトルクと可動範囲の両立を実現しました。 現在は3行3列構成(図4)と5行2列構成(図5)の試作機が完成しており、Pedal-wave推進や旋回動作などが実現しています。
参考文献
- 佐藤邦彦, 程島竜一, 琴坂信哉, ''板状機能体の研究 第1報:機械モデルの構成法と移動法の提案'', ロボティクス・メカトロニクス講演会2016, 1A1-12a1, 2016.
- 佐藤邦彦, 程島竜一, 琴坂信哉, ''板状機能体の研究 第2報:試作機の開発と推進実験'', 第34回日本ロボット学会学術講演会, 1G3-06, 2016.