RESEARCH
Motion trajectory generation
-

Trajectory generation for synchronous motion by phase feedback
A method for trajectory generation that can adapt to external signals using phase feedback
-
Trajectory generation for adaptive motion by PLL
A method for trajectory generation that can adapt to external signals using PLL

Trajectory generation based on momentum space
A method for trajectory generation in momentum space according to various work targets for the purpose of effective utilization of unnecessary joint degrees of freedom for work.
-
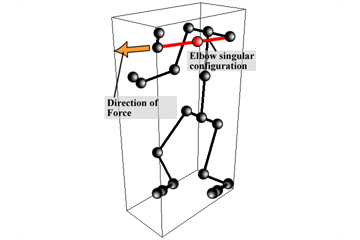
Motion generation for humanoid robot using singular configuration
Selective use of actuators using joint contraction to increase manual force generation and reduce overall energy consumption
Robot safety
-
Risk estimation for human-symbiotic-robot
We are developing a risk estimation method for human coexisting robots using human motion analysis.
-
Contact force reduction motion
When an unavoidable collision occurs with a human coexisting robot, we are researching a method to reduce the impact force at the time of the collision by making the robot move its arms proactively.
RT-middleware
-
Engineering samples of RT-middleware
We are developing a sample that can easily reproduce the basic motions required for an industrial robot on RT-middleware.
Gait pattern
-
Gait pattern generation for a multi-legged walking robot using graph theory
Graph search examines the order in which the legs move and the robot walks appropriate to the terrain
Tactile system
-

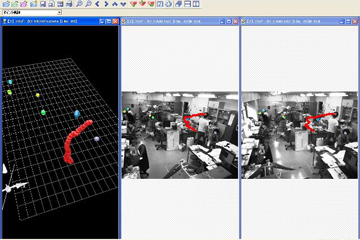
Object recognition by machine learning using vibration data obtained from high precision tracing motion
The user identifies objects with different surface conditions using precise tracing motions by manipulators
Multi-legged robot
-
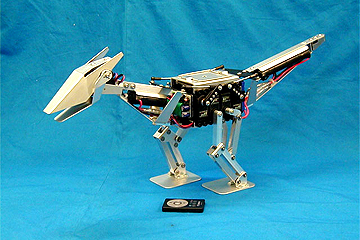
Dinosaur-like bipedal robot TITRUS III
Unlike the human form, this robot walks while balancing on its neck and tail.
-
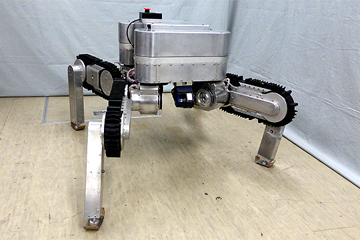
Track-changeable quadruped walking robot TITAN X
A quadrupedal robot that can switch between walking and crawler propulsion in a selective manner.

Quadruped walking robot for steep slope operation TITAN XI
World's largest quadruped robot to replace humans on slopes
-
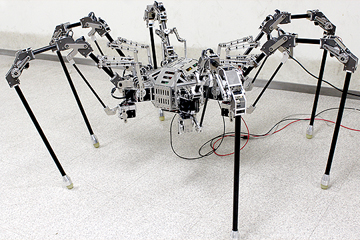
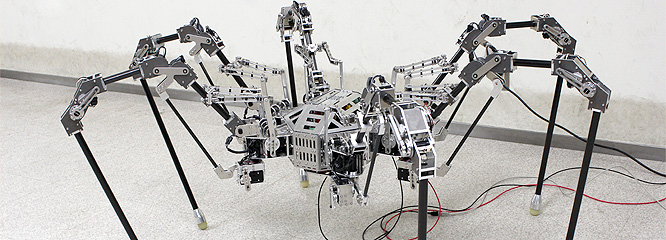
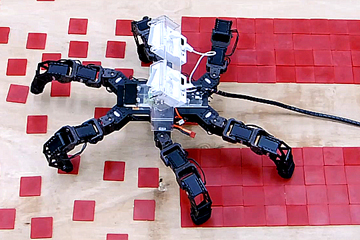
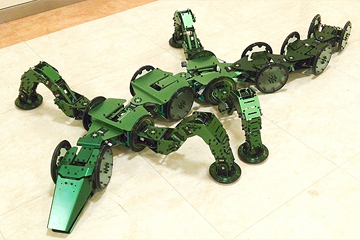
Harvestman-like hexapod walking robot ASURA I
This robot has long legs based on the harvestman. It can be expected to have high performance in traversing rough terrain.
-
Lizard-like quadruped robotSAURUS I
Work-oriented mobile robot based on biological lizard form
Undulatory locomotion robot
-
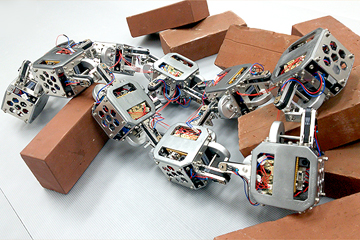
Flatworm-like robot WORMESH-I
Pedal locomotary mobile robot inspired from flatworms
Tethered robot
-
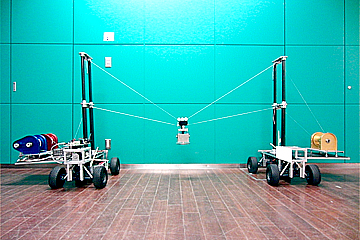
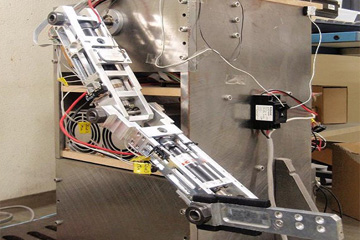
Far-reach tether tool system with tether suspension system
The system uses two vehicles and two tethers to remotely manipulate the work tool.