Harvestman-like hexapod walking robot: ASURA I
Figures and Photos
-
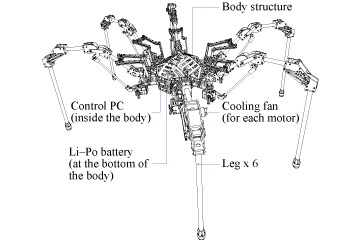
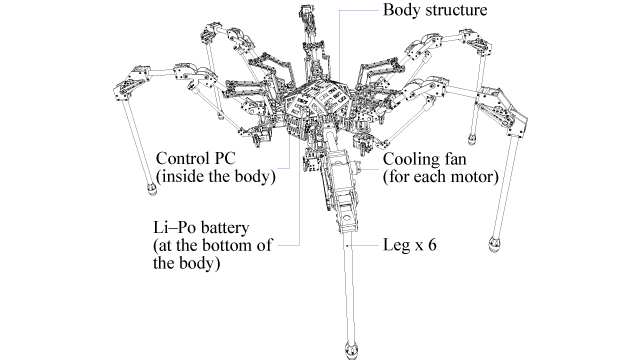
Fig.1:3D-CAD Mockup
Mobile form with long legs inspired from harvestman
-
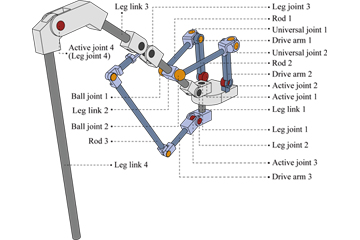
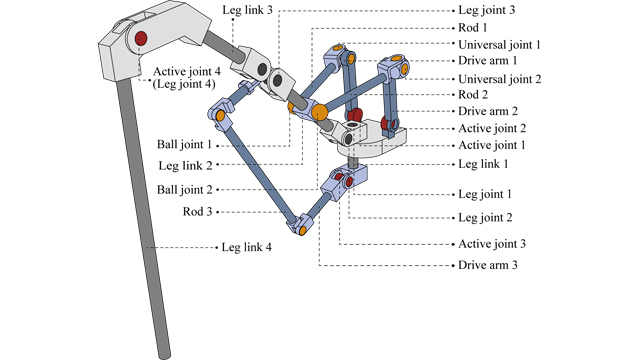
Fig.2:Leg mechanism
Coupled drive mechanism, pantograph mechanism, double joint and offset joint are introduced.
-
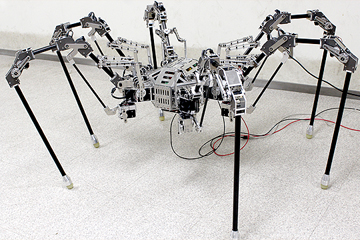
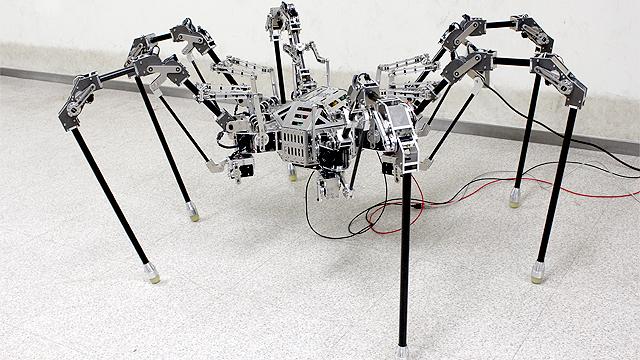
Fig.3:Prototype
Prototype
Summary
It has been pointed out for a long time that the legs of a walking robot should be insect-shaped, and the leg length should be as long as possible and the range of motion of the leg tips should be as wide as possible to enable the robot to walk on uneven terrain. However, due to the lack of actuator performance and leg rigidity, conventional walking robots have not been able to achieve long legs compared to the body even though they are small in size. Therefore, we are developing a harvestman-like robot with a large leg-length to body-length ratio, which has long legs and can traverse rough terrain in the nature (Fig.1). If such a robot is constructed, it can be expected to have high static stability and traverse rough terrain due to its physical characteristics. For this purpose, the legs must be designed to be able to generate power at the tip of the leg to support the weight of the robot away from the body, and to have a wide range of motion and high rigidity. In order to satisfy these requirements, the following innovations have been made in the design of the legs (Fig.2).
- CFRP is used for some of the components to reduce the overall weight of the legs and suppress the moment of inertia.
- Introduction of coupled drive mechanism, a type of differential mechanism, for high efficiency and high power.
- The introduction of a pantograph mechanism separates the support linkage system from the drive linkage system and increases the rigidity of the leg structure.
- Increased range of motion in the joints due to double and offset joints.
References
- Ryuichi Hodoshima, Yoshikazu Ohura, Yuki Nishiyama, Akihiro Sakaki, Soichiro Watanabe and Shinya Kotosaka, ''The ASURA I harvestman-like hexapod walking robot: compact body and long leg design,'' Advanced Robotics, Vol.30, No.23, pp.1467-1483, 2016.
- R.Hodoshima, S.Watanabe, Y.Nishiyama, A.Sakaki, Y.Ohura and S.Kotosaka, ''Development of ASURA I: Harvestman-Like Hexapod Walking Robot -Approach for Long-Legged Robot and Leg Mechanism Design-,'' Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems 2013, WeAT13.5, 2013.
- 渡邊宗一郎, 西山雄輝, 程島竜一, 琴坂信哉, ''ザトウグモ型6 足歩行ロボットASURA I の開発 ―第4報:脚機構の解析と基本動作実験―'', ロボティクス・メカトロニクス講演会2013, 1A1-P10, 2013.
- 西山雄輝, 榊明裕, 瀬尾隆, 大浦義和, 程島竜一, 琴坂信哉, ''ザトウグモ型6足歩行ロボットASURA Iの開発 第2報:基準歩容解析と構造設計'', ロボティクス・メカトロニクス講演会2012, 2A2-T02, 2012.
- 程島竜一, 大浦義和, 榊明裕, 西山雄輝, 瀬尾隆, 琴坂信哉, ''ザトウグモ型6足歩行ロボットASURA Iの開発 第1報:脚機構設計と脚駆動試験'', ロボティクス・メカトロニクス講演会2012, 2A2-T03, 2012.