Motion generation for humanoid robot using singular configuration
Figures and Photos
-
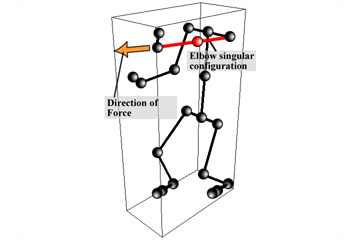
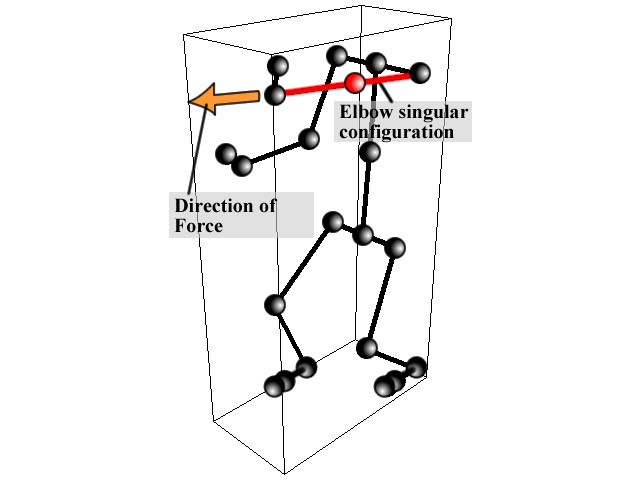
Fig.1: Working with singular configuration
Humans actively engage in pushing motions in daily life with an extended elbow.
-
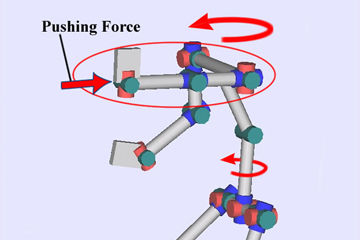
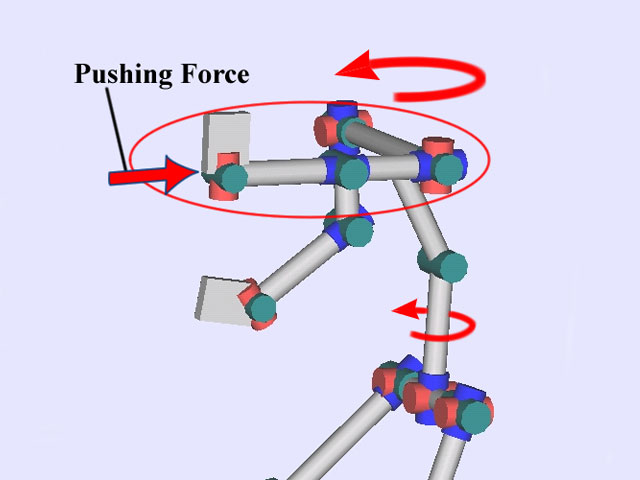
Fig.2:Proposal of working method by selective use of actuators
By retracting the wrist and elbow joints, the large power actuators in the trunk of the body generate large dexterity forces without placing a large load on those joints.
Summary
In recent years, multi-DOF robots with dozens of DOFs, such as humanoid robots, have become feasible. However, from the point of view of the use of DOFs, they are no different from conventional robotic manipulators, and the fact that the DOFs are not actively utilized is not sufficient. In addition, these robots do not have enough dexterity to perform the same kind of work as humans do. In our daily activities, we often perform pushing motions such as stretching our elbows and maintaining a standing posture with our legs extended. For example, as shown in Fig. 1, when we push with the palm of our hand, the wrist and elbow joints are retracted to generate dexterous force by the muscles of the trunk of the body without generating a large torque in the wrist and elbow joints, which have a small output. The selective use of actuators using such joint DOF contraction and retraction can be very useful for maximizing the capabilities of a robot system in a multi-DOF robot system. Therefore, this study proposes a method of working by selective use of actuators using joint singular configuration in the working direction. In this method, we select an actuator that bears the load torque by effectively having a singular configuration in the DOF of the robot's linkage mechanism. For example, the small joints are degenerated and the large joints are used to generate the end-of-hand output. Figure 2 shows a schematic diagram of the selective use of an actuator using joint singular configuration. In Fig. 2, the wrist and elbow joints are retracted to generate a large force by using a high-powered actuator on the trunk of the body without placing a large load on those joints. When working in a normal elbow-bent posture, it is necessary to restrict the output torque of the wrist and elbow joints to prevent saturation of the output torque. However, by placing both joints in a singular posture, hand-pressing forces can be generated by the trunk actuators without the need to consider the output limits at the wrist and elbow joints.
References
- 琴坂信哉, 大滝英征, ''多自由度ロボットにおける機構自由度の縮退を利用したアクチュエータの選択的利用'', 日本ロボット学会誌, Vol.25, No.8, pp.115-121, 2006.