Contact force reduction motion
Figures and Photos
-
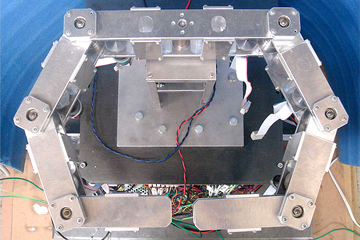
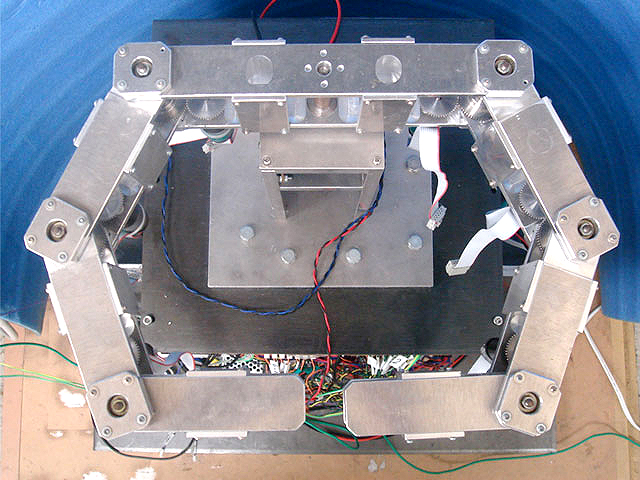
Fig.1: Planar 7-DOF dual-arm manipulator
Planar 7-DOF dual-arm manipulator
-
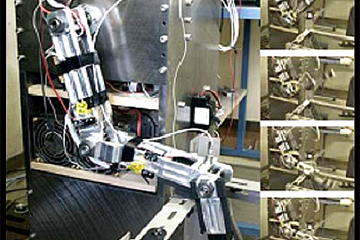
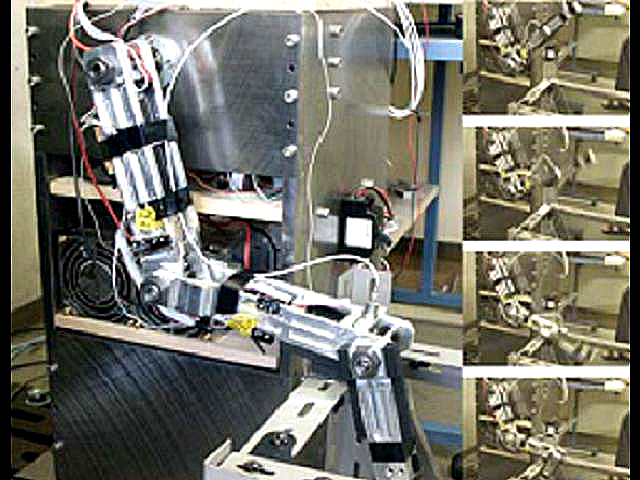
Fig.2: Vertical surface 3-Link manipulator
Vertical surface 3-Link manipulator
-
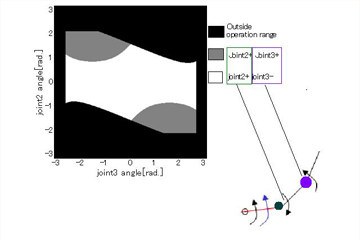
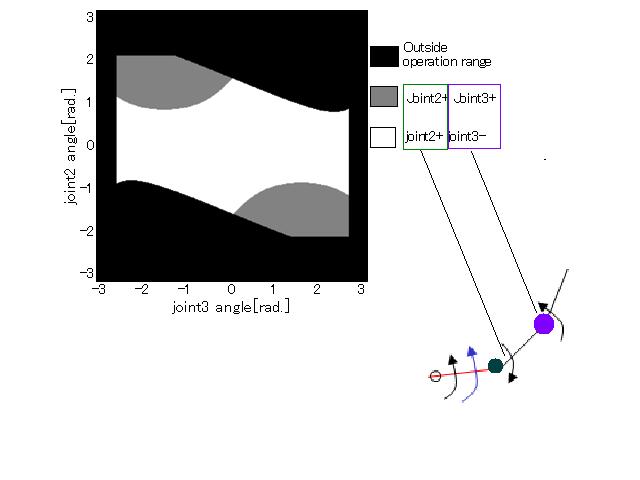
Fig.3: Distribution of joint torque combinations
Distribution of joint torque combinations calculated offline
Summary
In recent years, robots that share a working environment with humans have been developed. As a result, the importance of safety measures against collisions has increased. Of course, it would be nice if the collision could be avoided, but we also need to consider what happens if it cannot be avoided. Until now, most of the countermeasures after a collision have been based on emergency stop or joint compliances, which are not suitable for high-speed collisions. Therefore, in this study, we propose a method to reduce the impact force by actively moving the robot itself as one of the approaches to reduce the impact force. The dual-arm 7-link manipulator shown in Fig.1 and the 3-linked manipulator that can achieve high angular acceleration as shown in Fig.2 are used in our research. (1) Mutual inertia force It is a method of decelerating a collision link with high acceleration by utilizing the mutual inertia between the links generated during operation of the manipulator. Although the mutual inertia force depends on the posture of each link, it is possible to obtain the combination of joint torques that should be generated in a sufficiently short time by calculating them offline in advance, as shown in Fig.3. Experiments with a 3-link manipulator have proven its effectiveness, and the system is currently being expanded to a 7-link manipulator. (2) Optimal braking method The high-acceleration deceleration technique due to mutual inertia forces is not a panacea. There must be sufficient DOF in the front and rear between the collision links. Therefore, we developed a simplified optimal braking method for the case of hand collision by utilizing the optimal braking method proposed by Jeong, Takahashi et al. This method is not as optimal as proposed by Jeong et al, but it significantly reduces the amount of computation and allows the robot to respond quickly in the event of a collision. The short computation time is also important because collision phenomena are very short-lived (a few milliseconds to tens of milliseconds). In addition to the mutual inertia method introduced in (1), we are developing a method to select an appropriate impact force reduction method depending on the collision situation and its implementation to a 7-link manipulator.
References
- 琴坂信哉, 後藤大輔, 大滝英征, ''マニピュレータ衝突時の安全性向上へのアプローチ'', 日本機械学会ロボティクス・メカトロニクス講演会2007講演論文集, 2007
- 琴後藤大輔, 琴坂信哉, 大滝英征, ''緩衝材と相互慣性項の利用によるマニピュレータ衝突時の衝撃力軽減'', 日本機械学会関東支部第12期総会講演会 日本機械学会関東支部第12期総会講演会論文集, pp.277-278, 2006
- 菊池太季, 琴坂信哉, 大滝英征, ''衝突時の衝撃力の予測に基づいた平面3自由度マニピュレータの衝撃力軽減動作'', 日本機械学会関東支部ブロック合同講演会2004宮代 ブロック合同講演会2004宮代講演論文集, pp.233-234, 2004