Trajectory generation for synchronous motion by phase feedback
Figures and Photos
-
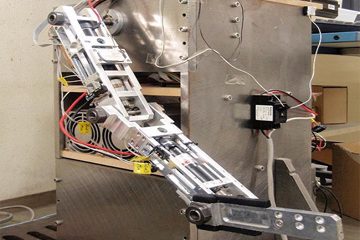
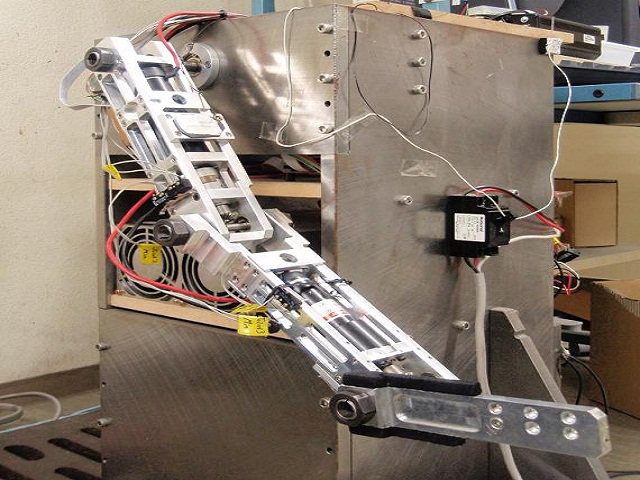
Fig.1: Planar three-link manipulator
A 3-linked manipulator that moves on a plane that resembles a human arm.
-
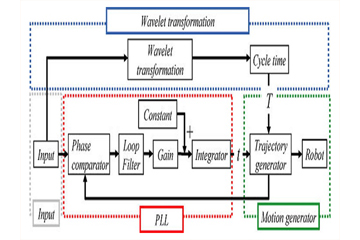
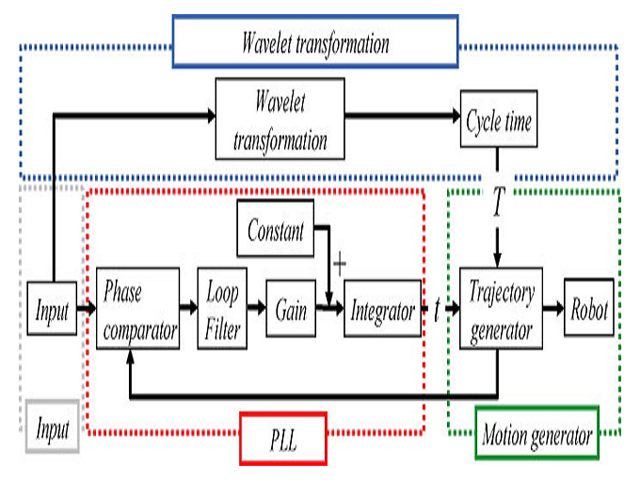
Fig.2: Phase feedback method using wavelet transform
We add a wavelet transform to the traditional phase feedback method to extract the motion period.
-
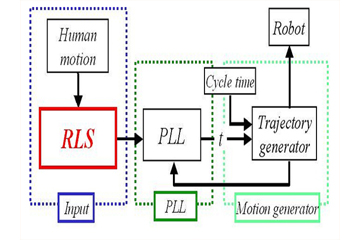
Fig.3: Phase feedback method with motion prediction
Synchronous motion trajectory generation by adding motion prediction to conventional phase feedback
-
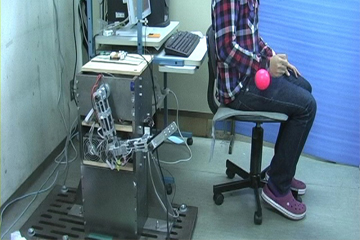
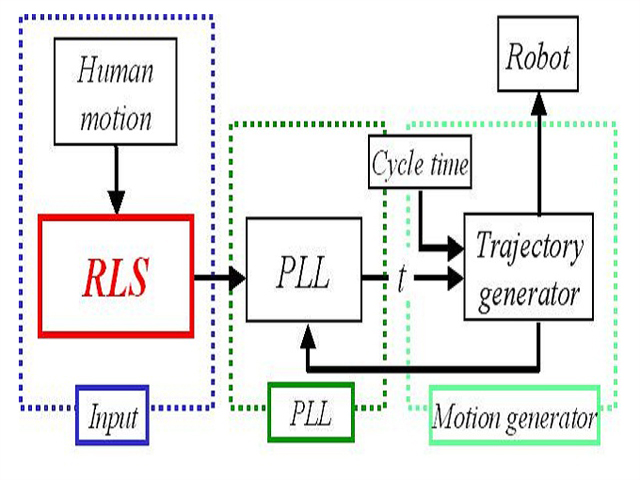
Fig.4: Human-robot synchronization
The system measures human movement and the robot performs the movement accordingly

Summary
In order to expand the field of robot activities, robots are required to play an active role in human life as well as in public places. In this context, robots are required to have the ability to perform cooperative tasks to replace or assist human activities. In order to do this, the robot needs to adapt to the ever-changing environment from time to time. In this study, we propose a method of generating a robot's motion trajectory by using phase feedback to adapt to external signals, and we are conducting experiments using an experimental robot (Fig.1). The three features of this study are as follows:
- Arbitrary motion trajectories can be generated using the Fourier series approximation
- The system can be synchronized to a motion consisting of multiple cycles by using a wavelet transform to extract a specific motion cycle (Fig.2).
- By using gain control and the robot's own motion trajectory feedback, the system can synchronize some of its movements to hidden ones.
- If the amplitude of the human motion to be synchronized varies, the generated motion trajectory is distorted.
- If the motion to be synchronized is invisible, the generated motion trajectory is distorted and not synchronized.
References
- 生方崇之, 琴坂信哉, 大滝英征, ''位相フィードバックを用いたロボットの同期的運動軌道生成'', 第25回日本ロボット学会学術講演会, 2007.
- 渡邉明博, 程島竜一, 琴坂信哉, ''位相フィードバックを用いたロボットの同期的運動生成-運動予測による同期性能の改善-'', 第11回計測自動制御学会システムインテグレーション部門講演会, 2010.