Trajectory generation for adaptive motion by PLL
Figures and Photos
-
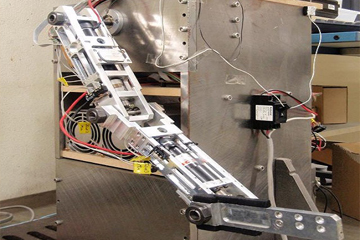
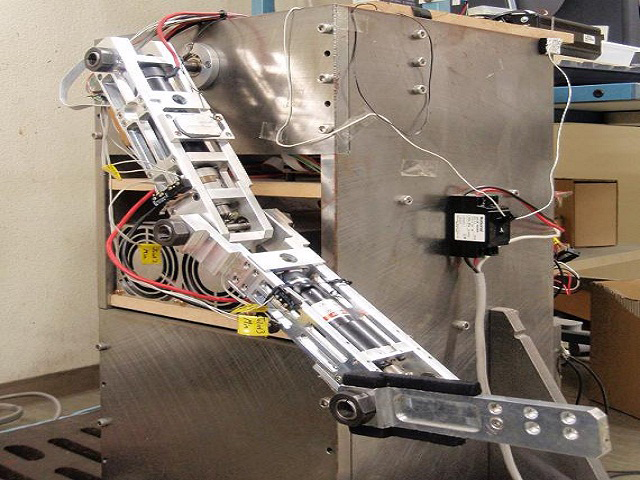
Fig.1: Planar three-link manipulator
A 3-linked manipulator that moves on a plane that resembles a human arm.
-
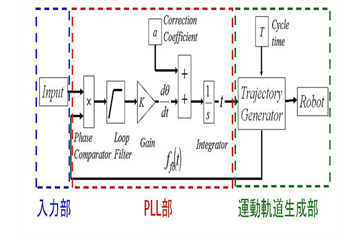
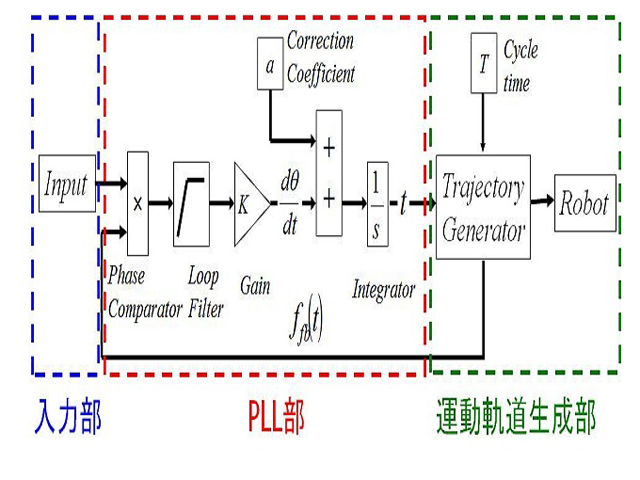
Fig.2: Phase feedback method using wavelet transform
The method consists of three parts: an input part, a PLL part and a motion trajectory generator
Summary
In recent years, robots have been used in a variety of ways, and entertainment robots have appeared in real life as well. However, the robots used in real life have not yet become practical partner robots to help with tasks. One of the reasons for this is that it is difficult for them to adapt to changes in their environment and exercise. Therefore, we propose a method to generate the motion trajectory of a robot adapted to an external signal using PLL (Fig.1). Phase Locked Loop (PLL) is a method for matching the phases of two input signals. The method consists of the following three parts (Fig.2).
- Input section: The sensor acquires signals from the outside world and performs pre-processing, such as noise removal and waveform shaping, if necessary.
- PLL section: External signals from the input section and feedback signals from the motion trajectory generator are input to synchronize the phase of the two signals.
- Motion trajectory generator: The target period and the target phase from the PLL are input, and the Fourier series approximation is used to generate an arbitrary periodic motion based on these two inputs.
- If the amplitude of the human motion to be synchronized varies, the generated motion trajectory is distorted.
- If the motion to be synchronized is invisible, the generated motion trajectory is distorted and not synchronized.
References
- 舘野晴彦, 琴坂信哉, 大滝英征, ''PLLを用いた適応的運動軌道生成'', 第23回日本ロボット学会学術講演会, 2005.