Far-reach tethered working tool between mobile platforms: XPiDER
Figures and Photos
-
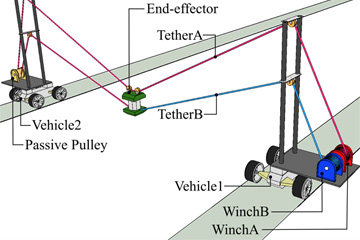
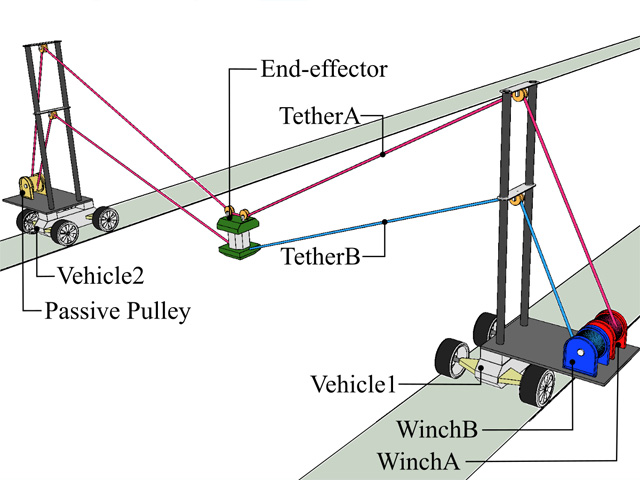
The concept of far-reach tethered working tool
Two running vehicles running side by side, two winches to control the tether, and a working device that moves in the air between the vehicles by means of a looped tether suspension.
-
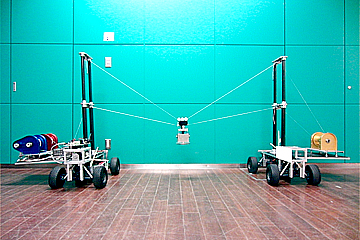
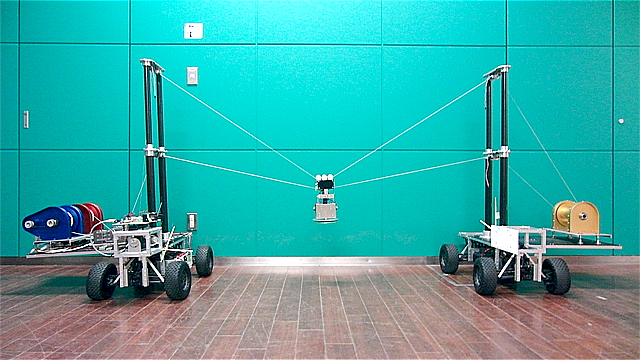
Prototype experimental system
New winch mechanisms and work equipment were developed and installed on a mobile platform that was converted from RC vehicles.
-

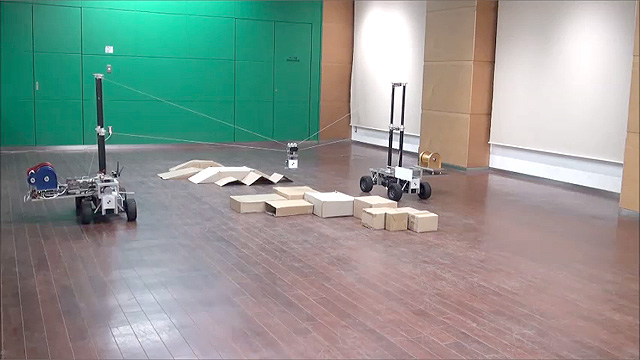
An experiment that mimics mowing
Moving the work equipment to follow the unevenness of the actual mowing area
Summary
There have been attempts over the years to introduce robots to save labor on large areas of land.
Such wide-area work systems have traditionally included automatic tractors using agricultural GPS or multicopters for monitoring work under extreme conditions.
However, wide-area work systems, such as autonomous vehicles and multicopters, can take a significant amount of time to complete a task or make travel itself difficult in some environments.
As a solution to this problem, we have focused on the parallel tether suspension mechanism and proposed a wide area work system consisting of two driving vehicles and a parallel tether suspension mechanism (Fig.1).
In this system, the tether suspension mechanism can move up and down and left and right between the moving vehicles by means of two winch mechanisms, making it possible for the system as a whole to carry out work while moving in three dimensions in space.
The propsed far-reach working tool system consists of the following elements
- Tethered drive system: two winches are coaxially located on one vehicle. When the outputs of the winches are connected by a clutch mechanism, it is possible to switch the two wires into a single connected pseudo-closed loop structure. This configuration eliminates the generation of negative energy, which has been a problem with conventional parallel tether systems, and improves energy efficiency, which is one of the important issues in mobile robot systems.
- Two vehicles running side by side: In order to maintain tether tension, the vehicles run side by side at a constant distance. To achieve this, the LRF (Laser Range Finder) is used to estimate the position and attitude of the slave vehicles, while the two vehicles are controlled to run side by side by a leader follower type control system.
- Tethered suspension system: This is a work device that is suspended by two tethers and moved between vehicles. Various tasks can be performed by changing the work equipment for different purposes. Possible applications include weeding, pesticide spraying, land mine exploration, and terrain data acquisition.
References
- 程島竜一, 下鳥宇宙, 望月恒星, 富永涼太, 吉田増大, 琴坂信哉, 福島 E. 文彦, 広瀬 茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第3報:テザー懸垂移動装置による草刈りシステムの構築と検証実験―'', ロボティクス・メカトロニクス講演会2018, 1A1-J07, 2018.
- 下鳥宇宙, 富永涼太, 望月恒星, 高橋康文, 程島竜一, 琴坂信哉, 福島 E. 文彦, 広瀬茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第2報:移動制御システムの構築と検証実験―'', ロボティクス・メカトロニクス講演会2016, 1P1-06b6, 2016.
- 望月恒星, 棚林祐一郎, 亀割拓, 程島竜一, 琴坂信哉, 福島E.文彦, 広瀬茂男, ''走行車両間のテザー懸垂移動装置を用いた屋外広域作業システムの開発 ―第1報:屋外広域作業システムの概要および実験システムの試作―'', 第33回日本ロボット学会学術講演会, 1K3-02, 2015.