Engineering sample of RT-Middleware
Figures and Photos
-
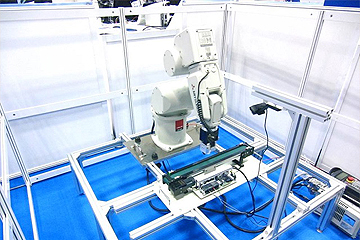
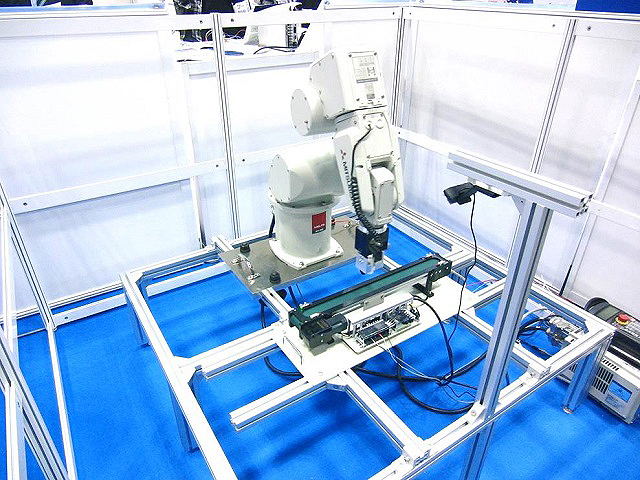
Fig.1: Overview of robotic systems
A system that uses camera and teaching functions to allow an industrial robot to pick and place a workpiece as it moves along a conveyor belt
-
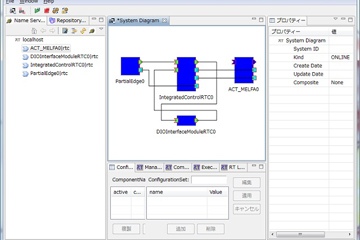
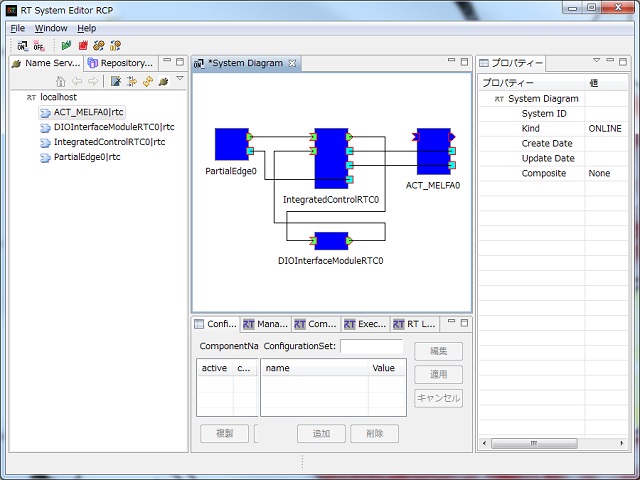
Fig.2: RT component connection
It consists of three hardware RTCs (robot, camera, and digital I/O interface) and an application RTC for general control.
-
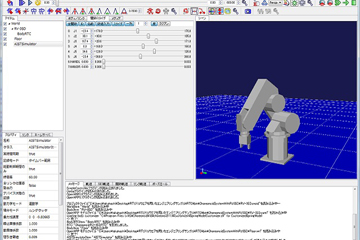
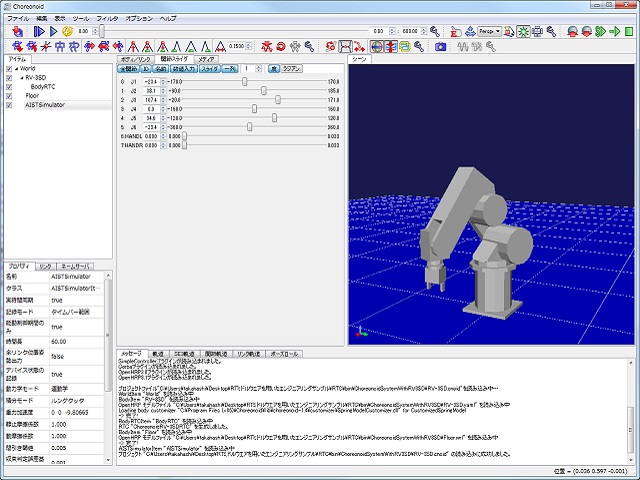
Fig.3: Simulation environment
Using the kinematics/dynamics simulator "Choreonoid," you can experience engineering samples for free, even if you don't have an actual machine.
-
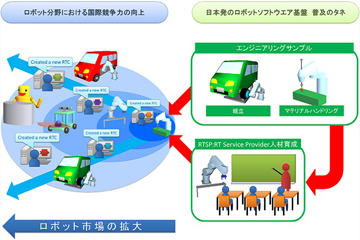
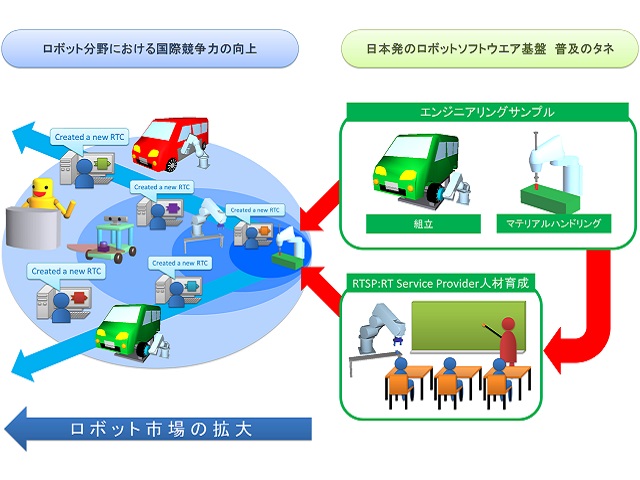
Fig.4: Future contributions to society
Contributing to the expansion of the robotics market and the improvement of international competitiveness in the field of robotics through industrial applications of RT-middleware and human resource development.
Summary
Previous projects related to the Robot Technology Middleware (RTM) have not been designed with industrial applications in mind, and this has hindered the spread of the technology to existing robot users. Therefore, we are developing engineering samples with the following characteristics in order to evaluate the potential of RT-middleware for industrial applications.
- Actual industrial equipment controlled by RT-middleware
- It easily reproduces the basic motions required by industrial robots
- Aiming for a price that makes it easy for small and medium-sized companies to introduce, the hardware is about 510,000 yen plus a 6-axis vertical articulated robot.
- Detailed system configuration and operation instructions and manuals are distributed
- All of the possible ones are free & open source and the rest are disclosed where to get them.
References
- ''RTミドルウエアを用いたエンジニアリングサンプル'', 2013国際ロボット展 新エネルギー・産業技術総合開発機構(NEDO)ブース.
- 高橋直希, 藤間瑞樹, 程島竜一, 琴坂信哉 : ''RTミドルウエアの産業応用を目的としたエンジニアリングサンプルの開発'', 第14回計測自動制御学会システムインテグレーション部門講演会, 1B2-4, 2013.