Track-changeable quadruped walking robot: TITAN X
Figures and Photos
-
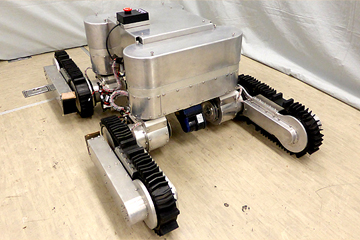
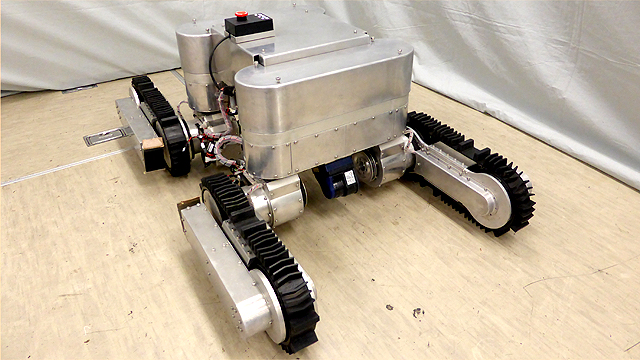
Fig.1: Crawler propulsion form
Advantageous for moving on land preparation and lightly uneven terrain
-
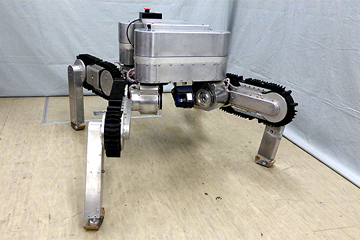
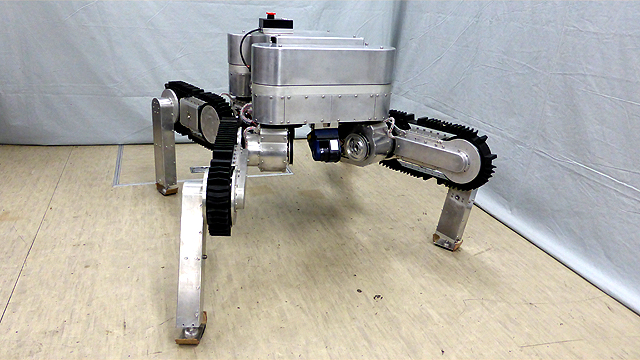
Fig.2: Legged walk form
Advantageous for traveling on rough terrain
-
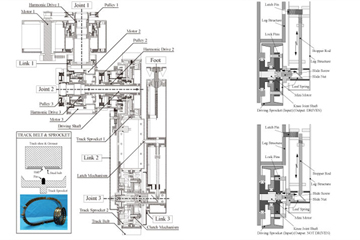
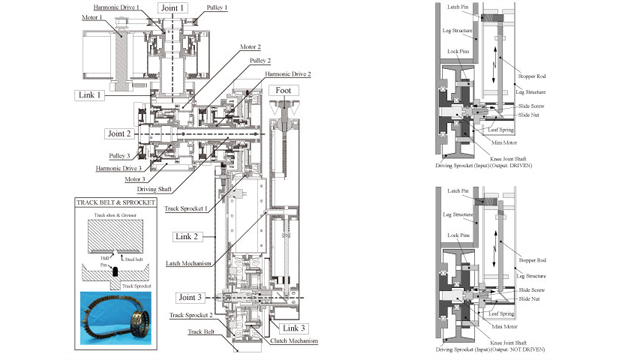
Fig.3: Design of leg mechanism
Crawler belts for locomotion are also converted to timing belts for driving joints.
-
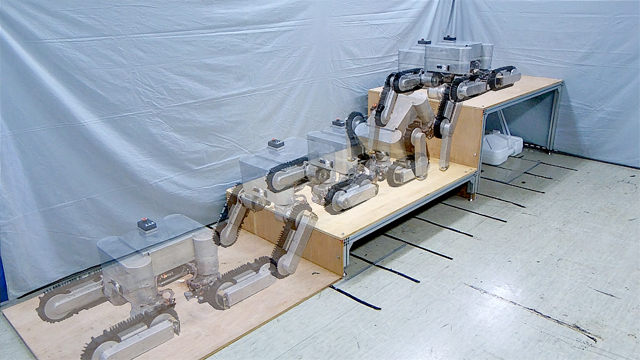
Fig.4: Leg crawler hybrid motion
Leg crawler hybrid locomotion
Summary
The track-changeable quadruped walking robot can switch between two states, walking and crawler locomotion (Figs. 1 and 2). Combining the characteristics of both the walking robot, which can traverse many type of terrain, and the crawler robot, which has highly mobility even over rough terrain, will make it possible to respond flexibly to uneven terrain. The combination of a crawler with a walking robot has been proposed in the past, but the legs are too heavy for a simple combination, which limits the walking performance. In contrast, the track-changeable quadruped robot introduces a special belt in its power transmission system, and the power transmission belt for leg drive can be used as a crawler belt for crawler propulsion. As shown in Fig.3, the switch from walking to crawling is accomplished by securing the tibial portion to the outer surface of the thigh portion and separating the tibial portion from the knee joint by clatch mechanism. This makes it possible for the leg mechanism to have not only high mobility but also crawler propulsion functions. The developed track-changeable quadrupedal robot has an overall length of 900 mm, width of 600 mm, and weight of 29 kg. The track-changeable quadruped robot is a vehicle that can not only switch between two modes of locomotion but also combine the characteristics of its legs and crawlers. As shown in Fig. 4, we have developed a motion plan that enables the robot to overcome large steps that would have been impossible to overcome with the leg or crawler mechanism alone, and we aim to improve the mobility of the robot by the combined leg and crawler motion.
References
- 程島竜一, 福村泰明, 天野久徳, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 -脚機構の基本設計と動作実験-'', 日本ロボット学会誌, Vol.28, No.7, pp.872-879, 2010.
- R.Hodoshima, Y.Fukumura, H.Amano and S.Hirose, ''Development of Track-changeable Quadruped Walking Robot TITAN X -Design of Leg Driving Mechanism and Basic Experiment-,'' Proc. of 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS10), WeCT10.2, pp.3340-3345, 2010.
- 程島竜一, 福村泰明, 天野久徳, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 –第2報:全体構成と基礎動作実験-'', 第27 回日本ロボット学会学術講演会, 1P2-06, 2009.
- 福村泰明, 程島竜一, 広瀬茂男: ''クローラ可変型4足歩行ロボットTITAN Xの開発 第1報:クローラ可変型脚機構の設計'', ロボティクス・メカトロニクス講演会2007, 1A1-F04, 2007.