Flatworm-like mesh robot WORMESH-I
Figures and Photos
-
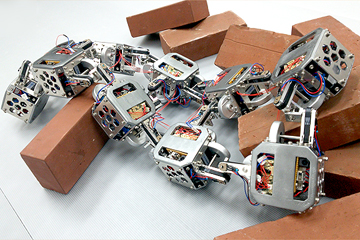
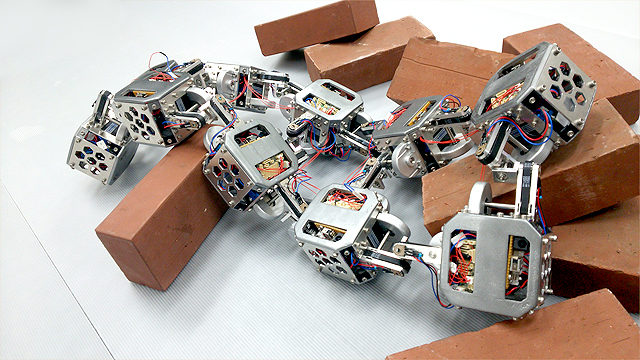
Fig.1: Locomotion over uneven terrain
WORMESH-I can locomote over uneven terrain
-
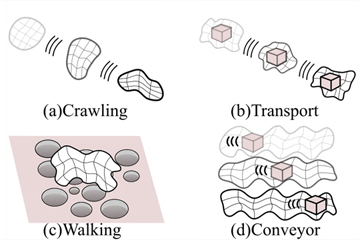
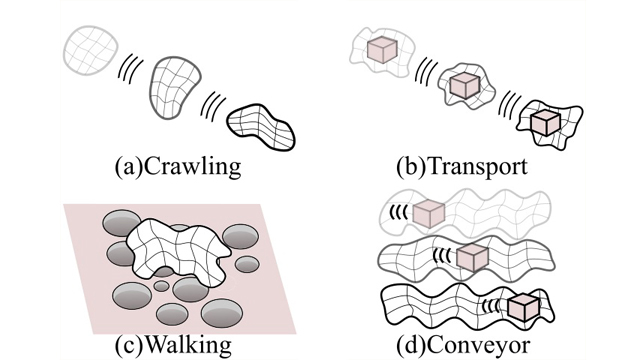
Fig.2: Robot characteristics
WORMESH-I can move and work in a variety of environments
-
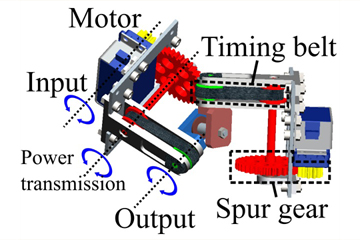
Fig.3: Joint mechanism
Joint composed of 2 active degrees of freedom + 1 passive degree of freedom
-
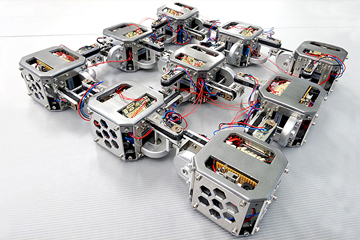
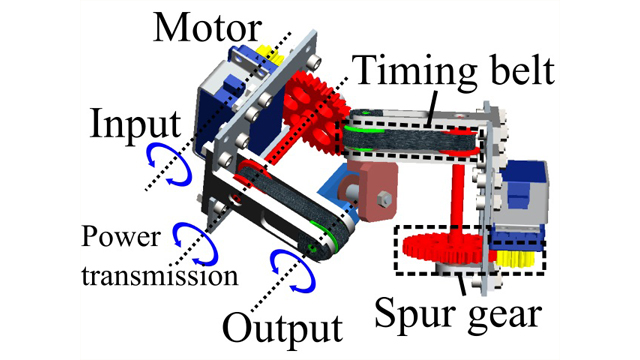
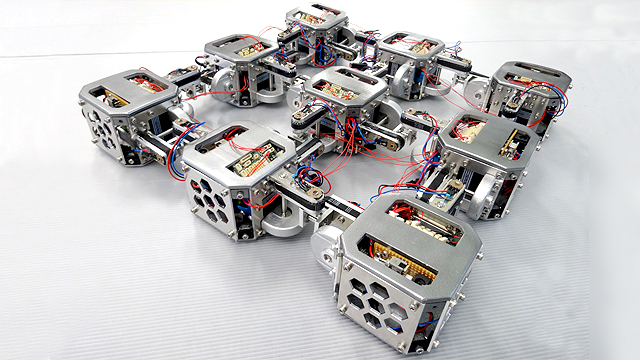
Fig.4: Robot prototype (square configuration)
Prototype robot using RC servo motors (3 x 3 units)
-
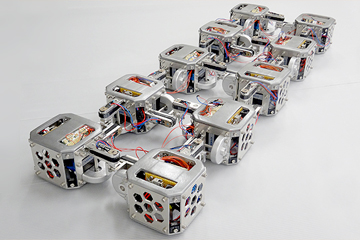
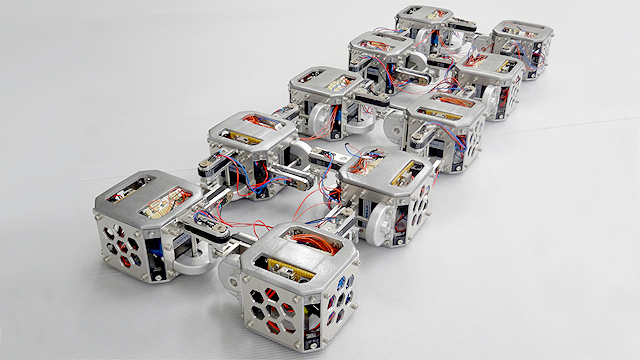
Fig.5: Robotic prototype (rectangular configuration)
Prototype robot using RC servo motors (5 x 2 units)
Summary
Many snake-like robots have been developed because snakes and worms can move and swim despite the fact that they lack limbs. In this study, we focus on sheet-like with not code-like bodies such as snakes and earthworms, in order to realize their movement mechanism, physical characteristics and environmental adaptability by a mechanical model (Fig.1). The proposed mesh robot differs significantly from previous studies in that it is able to generate three-dimensional motions in multiple directions by connecting modules in a two-dimensional plane. In addition, by configuring the robot in a two-dimensional plane, it can be used not only as a mobile body but also as a working body (Fig.2). Knowledge of the complex degree of freedom arrangement was needed to develop a mesh robot. Therefore, we proceeded with the development by feeding back the results of the dynamics simulation, as shown in Fig.3, to the design. In the final version, each module was connected with 3-DOF joints in the transverse and longitudinal directions, and the total active DOF was 24. In particular, 2 of the 3-DOF joints are active and the remaining 1-DOF is passive. The basic propulsion systems "Pedal-wave Propulsion", "Loop-gait Propulsion" and "Gliding Propulsion" have been confirmed by dynamic simulation. The designed joint is shown in Fig.4. A two-stage reduction mechanism with a gear in the first stage and a timing belt in the second stage is used for the joint mechanism. This allows for both high torque and increased range of motion of the joints. Prototypes of the three-row, three-row configuration (Fig.4) and the five-row, two-row configuration (Fig.5) are currently being constructed, and have achieved pedal-wave propulsion and turning movements.
References
- 佐藤邦彦, 程島竜一, 琴坂信哉, ''板状機能体の研究 第1報:機械モデルの構成法と移動法の提案'', ロボティクス・メカトロニクス講演会2016, 1A1-12a1, 2016.
- 佐藤邦彦, 程島竜一, 琴坂信哉, ''板状機能体の研究 第2報:試作機の開発と推進実験'', 第34回日本ロボット学会学術講演会, 1G3-06, 2016.