Dinosaur-like biped robot: TITRUS-III
Figures and Photos
-
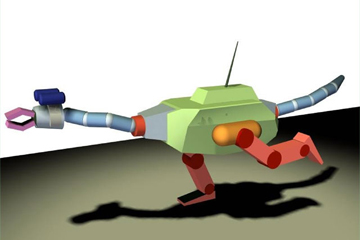
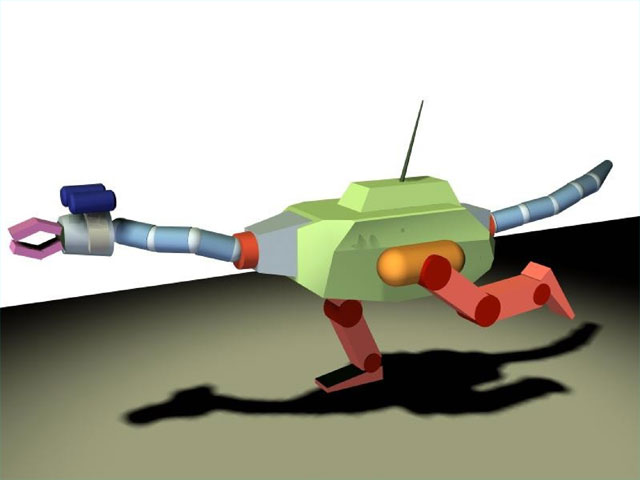
Fig.1: High speed mobility
This robot improves dynamic stability by balancing on its neck and tail
-
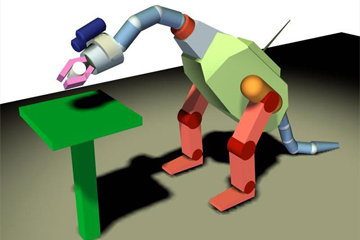
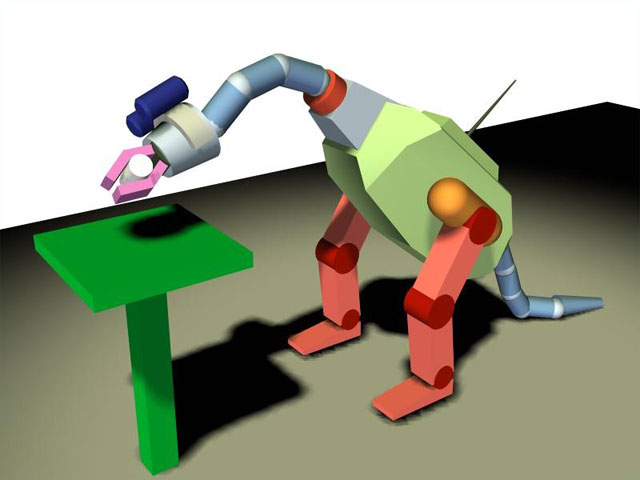
Fig.2: Stable work performance
This robot uses its neck and tail as a manipulator and a third leg, allowing it to work in a static and stable manner.
-
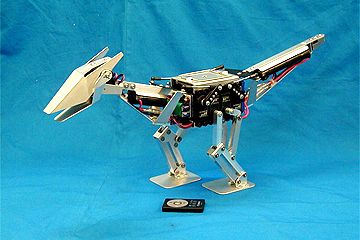
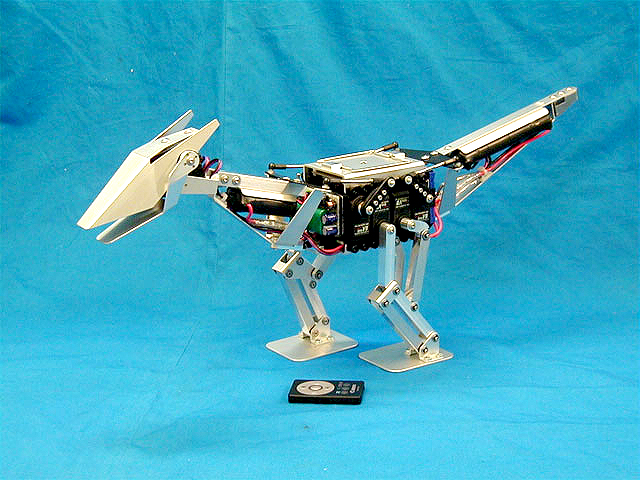
Fig.3: Prototype
Miniature model using RC servo motors
Summary
Humanoid robots are the most common form of work-moving bipedal robots, but the humanoid form is not necessarily suitable for this. For example, when performing tasks, the humanoid robot must keep its balance in an unstable bipedal state, and when walking at high speed and dynamically, the humanoid robot has difficulty in controlling the moment around the yaw axis generated by the kicking leg. Therefore, this study proposes a dinosaur-like bipedal robot with the following features, and studies are being conducted on its mechanical design and motion control.
- High dynamic stability can be achieved by actively using the neck and tail as a dynamic damper (Fig.1).
- By using the tail as a second tripod, it provides a stable foothold for the work (Fig.2).
- The neck can be used as a manipulator for a variety of tasks (Fig.2).
References
- 程島竜一, 片山俊郎, 滝田謙介, 広瀬茂男: ''恐竜型2足歩行ロボットTITRUS-IIIの研究(機構解析と歩行運動の安定性評価)'', 日本設計工学会誌, Vol.50, No.4, pp.178-187, 2015.
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Dinosaur-like Robot TITRUS -Its Dynamics and The Motion Utilizing the Dynamic Effect of the Neck and Tail-, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas (2003)
- nsuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Dinosaur-like Robot TITRUS -The Efficacy of the Neck and Tail of Miniature Dinosaur-like Robot TITRUS-III-, 2003 IEEE International Conference on Robotics and Automation (ICRA2003), Taipei (2003)
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: The Efficacy of the Neck and Tail of Miniature Dinosaur-like Robot TITRUS-III, 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2002), Lausanne (2002)
- Kensuke TAKITA, Toshio KATAYAMA, Shigeo HIROSE: Development of Miniature Dinosaur-like Robot TITRUS-III, 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2001), Hawaii (2001)
- Kensuke TAKITA, Ryuichi HODOSHIMA, Shigeo HIROSE:Fundamental Mechanism of Dinosaur-like Robot TITRUS-II Utilizing Coupled Drive, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), Kagawa(2000)