Lizard-like mobile robot: SAURUS I
Figures and Photos
-
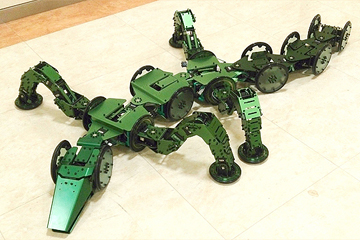
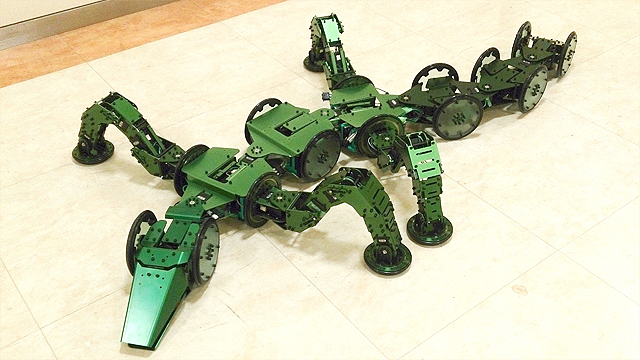
Fig.1: Prototype
Mobile form inspired by the lizard
-

Fig.2: Stable mobility
Improved dynamic stability due to tail wagging
-

Fig.3: Stable workability
The tail as the fifth leg can be used to climb over bumps and secure a stable foothold when working.
-
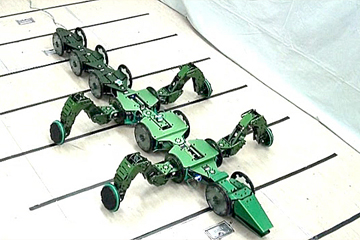
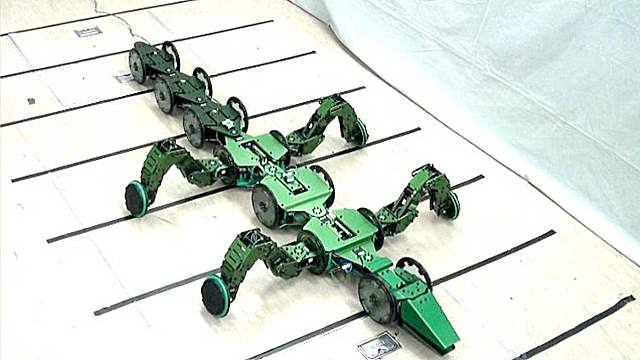
Fig.4: Multiple mobile form
Multiple forms of movement can be performed


Summary
Since weight reduction has become an important issue for mobile robots, robots with integrated functions of movement and work have been developed. In this study, we are developing a lizard-like robot as a mobile robot by adopting the concept of integrating the functions of locomotion and work, and reconsidering the lizard-like robot from an engineering point of view (Fig.1). Here's why the lizard-like form is ideal for mobile work
- Flexion of the trunk allows for large strides and high static and dynamic stability due to center of gravity control (Fig.2).
- Utilizing the tail as a fifth leg can improve stability when climbing over bumps and performing tasks (Fig.3).
- It can utilize its head and tail as a gripper to accomplish various tasks (Fig.3).
- Multiple modes of movement (walking, serpentine motion, and roller-walk) can be selected.
References
- 黒須弘稔, 石井宏知, 程島竜一, 琴坂信哉, 天野久徳, ''トカゲ型移動ロボットSAURUS Iの開発'', 第15回計測自動制御学会システムインテグレーション部門講演会, 1H3-3, 2014.
- 石井宏知, 黒須弘稔, 程島竜一, 琴坂信哉, ''トカゲ型移動ロボットSAURUS Iの開発 第1報:移動作業指向のトカゲ型ロボッ トの提案'', ロボティクス・メカトロニクス講演会2013, 1A1-P24, 2013.