Risk estimation for human-symbiotic-robot
Figures and Photos
-
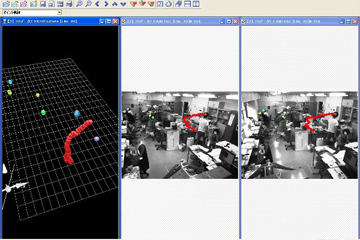
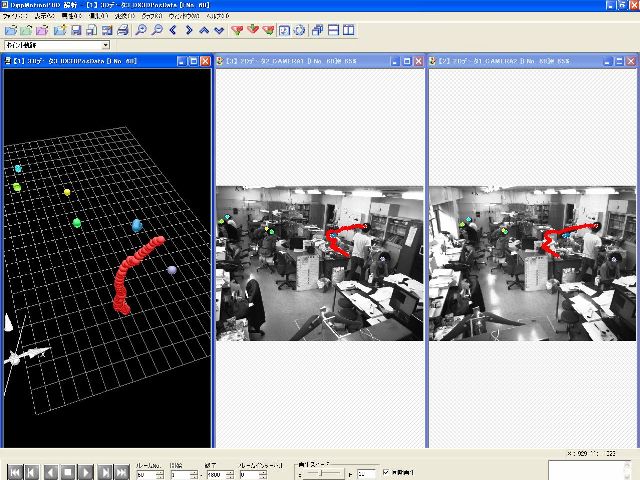
Fig.1: Motion analysis
Human motion analysis using a stereo camera and video analysis software.
-
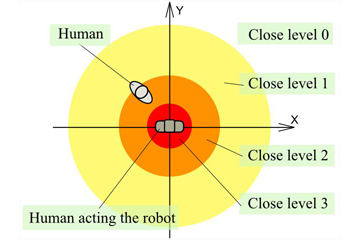
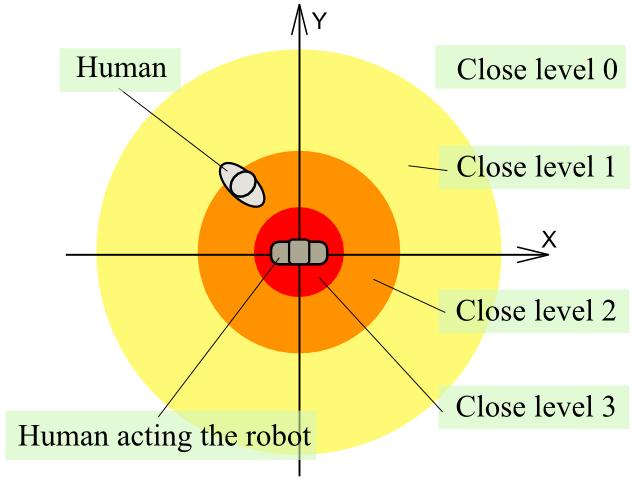
Fig.2: Proximity
The concept of proximity defined to determine clossness
-
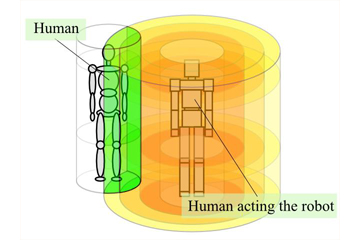
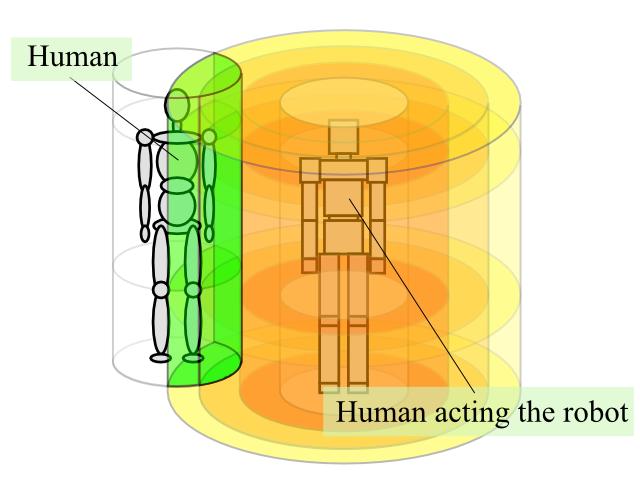
Fig.3: Surrounding space
Surrounding space used to estimate the probability of harm in the event of proximity
Summary
In recent years, there have been high expectations for humanoid robots to perform household chores and services, so-called "human coexistence robots". Since human coexisting robots work in the presence of humans, it is expected that they will have frequent contact with humans. Therefore, a risk assessment should be carried out in advance to understand the risks. Therefore, we are developing a method to estimate the probability of harm to humans by collision or pinching when a human coexisting robot works in a human living environment. Although it is possible to estimate the probability of harm by actually putting a robot into a human living space and obtaining statistical data of accidents, it is ethically problematic because of the risks involved. In this study, we propose a method to estimate the probability of occurrence of harm by analyzing the movements of a human assumed to be a robot based on the assumption that if humanoid robots are highly developed, they will behave and work in the same way as humans do. It can be said that hazards such as collision and pinching can only occur when a human and a robot are in close proximity. Therefore, the probability of occurrence of the harm can be expressed by the following two values.
- Frequency of robots approaching humans
- Probability of harm in the proximity of robots and humans
References
- 家老将太, 琴坂信哉, 程島竜一, ''人間の動作解析に基づく人間共存ロボットのリスク見積り―周囲空間内における身体の存在確率による危害発生確率の評価―'', 日本機械学会ロボティクス・メカトロニクス講演会2010講演論文集, 2011.
- 琴坂信哉, 小柳玲央, ''人間の移動履歴に基づく人間共存型ロボットのリスク見積り―機械的危険源の危害の暴露頻度評価―'', 日本機械学会ロボティクス・メカトロニクス講演会2010講演論文集, 2010.
- 小柳玲央, 琴坂信哉, ''人間の移動履歴に基づく人間共存ロボットのリスク見積り'', 日本機械学会関東支部総会講演会講演論文集, 16th, pp.65-66, 2010.