Momentum trajectory generation using redundant joints as counter weight
Figures and Photos
-
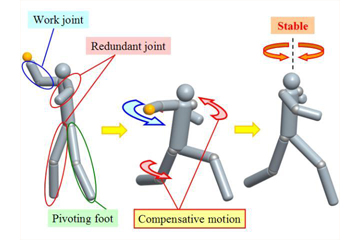
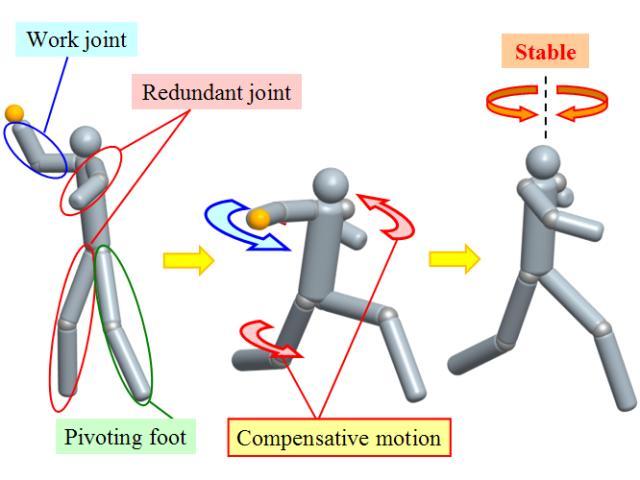
Fig.1: Dynamics compensatory action in human pitching motion
Humans use excess joints to maintain balance and reduce the energy comsumption on the arms and legs that move.
-
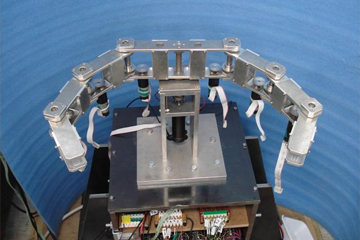
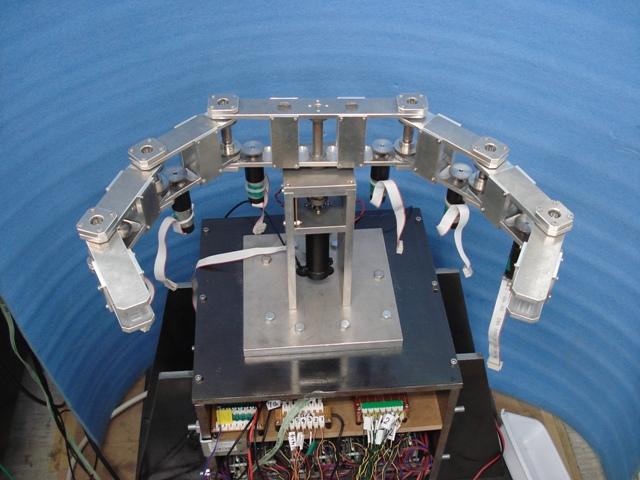
Fig.2: Planar 7-DOF dual-arm manipulator
This robot assumes the trunk and both arms of a humanoid robot.
-

Fig.3: Balance control experiment of throwing motion
Balance control experiments of a planar 7-DOF dual-armed manipulator using this method during throwing motion

Summary
In recent years, with the realization of multi-degree-of-freedom robots with autonomous locomotion capability as typified by humanoid robots, research on motion control and trajectory generation methods to utilize these robots effectively has been actively pursued. However, there is still little research on the active use of surplus joints. For example, in the case of throwing a ball with the right arm, not only the right arm but also the left arm and the right foot can move (Fig. 1). If we translate such motions into a machine or robot mechanism, we can assume that the excess joints are used as counterweights to perform dynamics compensating motions. Although a motion generation method that considers total momentum has been proposed to generate the dynamics compensatory motion of the robot, how to generate the momentum trajectory has not yet been discussed. In this study, a modified momentum trajectory generation method is proposed to generate a momentum trajectory according to various work targets in order to make effective use of the unnecessary joint degrees of freedom for work. In this method, the momentum trajectory is extracted from the momentum trajectory that realizes the pre-planned work goal, and this momentum trajectory is processed, so that the target value of the momentum trajectory need not be created from nothing. In addition, since the whole body momentum can be increased/decreased according to the objective while achieving the desired destination trajectory, dynamics compensatory motions can be generated using the excess joints, and various effects can be expected, such as balance control of the robot and reduction of drive energy. We have simulated both hitting and throwing motions of a planar 7-DOF dual-armed manipulator (Fig.2), which was made with the trunk and arms of a humanoid robot in mind, and confirmed that it is possible to control the balance and reduce the kinematic energy by using this method. We also confirm that it is possible to reduce both the total and the maximum reaction force generated on the trunk of the robot by balancing the throwing motion using the actual robot. (Fig.3)
References
- 伊藤廣紀, 琴坂信哉, ''冗長関節をカウンターウェイトとして用いる運動軌道生成法の多自由度ロボットへの実装'', 日本機械学会関東関東学生会第49回学生員卒業研究発表講演会論文集2010, pp.283-284, 2010.
- 大森貴之, 琴坂信哉, 大滝英征, ''多自由度ロボットにおける冗長自由度を用いた力学的補償動作'', 日本機械学会関東支部第13期総会講演会講演論文集2007, pp.287-288, 2007.
- 大森貴之, 琴坂信哉, 大滝英征, ''冗長関節をカウンターウェイトとして用いる運動生成の提案'', 日本機械学会関東支部第12期総会講演会講演論文集2006, pp.279-280, 2006.