
RTミドルウェアの学習を目的とした安価で入手容易なロボット上での実行環境の構築
●更新履歴
2011/11/ 8 - Ver. 1.0 本ページ公開
2012/ 2/29 - Ver. 2.0 全情報のアップデート.教育課程関連情報,SI2011・RTミドルウェアコンテスト2011関連情報公開 を大幅に内容を追加
2012/ 3/15 - Ver. 2.1 教育課程関連情報とユーザマニュアル関連情報のバグ・誤記の修正.実践テスト用DataConversionRTCのrtc.confを修正,全てのDataConversionRTCにrtc1.confとrtc2.confを追加.ユーザマニュアル,教員用資料の誤記を修正.
●概要
RTミドルウェアの導入教育を目的とした安価&入手容易&多人数向け&初心者向けのRTミドルウェア学習環境です.特に,実行するハードウェアを再現するのに必要な情報も含めて公開することにより,安価に構築でき,かつ修正,改善が容易になるように設計されております.また,本学習環境では,リファレンスハードウェア用に提供されている移動能力に関するRTC群を再利用できるだけの環境を用意しており,移動能力に関しては,リファレンスハードウェアを用いて学習するのと同等の学習効果を期待できます.
●特徴
1.安価で製作容易な移動ロボットを開発
・移動に関する最低限の機能を搭載した3輪移動ロボットを開発
・部品には入手容易な市販品を使用
・コストは3988円(ロボット胴体部の板,スイッチを安価な物に換えることにより2千円台も可能)
・ガーバーデータも用意されているので,基板を自分で発注できる
(上記の値段には,プリント基板の作成費(一台当たり)も含まれる.P板.com利用)
2.リファレンスハードウェアの移動能力を再現
・リファレンスハードウェア上で動作するRTC群「来訪者受付システムVer1.0」をリファレンスソフトウェアだと想定し,再利用
・来訪者受付システムの再利用性を実証
・リファレンスハードウェアから取得していた情報で3輪移動ロボットでは取得できない情報は,動力学シミュレータOpenHRP3を用いて取得
・安価なロボットでもリファレンスソフトウェアを利用可能であることを実証
3.RTミドルウェアの導入教育を行うための教育課程を編成
【学習目標】
・RTミドルウェアの使用方法の習得
・リファレンスソフトウェアにより実現可能な移動能力の把握
・シミュレーションと実環境との誤差の体感
【所要時間】
・実習:180分
・教育効果の評価:100分
【教育対象】
・PC,プログラミング,機械工学の基礎知識を有する工学部学生
・RTミドルウェアの使用方法を習得したい企業の技術者
【教育効果の評価方法】
・アンケート,筆記テスト,実践形式の習熟度確認テスト
・実習内容の一部を再実施することによる初回との所要時間の比較
4.全情報をオープンソースとして公開
・本学習環境や教育課程の入手・配布が容易
・ソフトウェア・ハードウェア両面で自由な修正や改善が可能
・修正BSDライセンスに基づき配布
●システム構成
図1に示すシステムにより,3輪移動ロボットは自律移動を実現
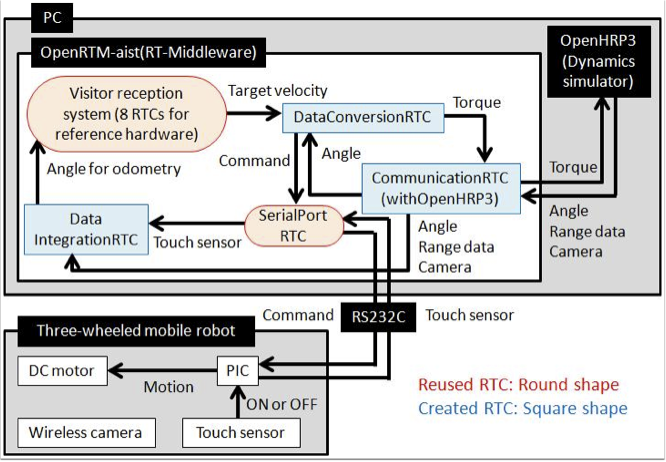
図1 RTミドルウェア学習環境のシステム構成
●使用環境
・言語:C++
・動作確認OS:Ubuntu 10.04 LTS
・RTミドルウェア:OpenRTM-aist-1.0.0
・動力学シミュレータ:OpenHRP Ver.3.1.1
●コンポーネント群
【再利用したRTC】
来訪者受付システムVer1.0の移動能力に関するRTC群
・PositionInput:目的地入力
・PathPlanning:経路計画
・Navigation:経路走行
・PathFollower:軌跡追従
・SwitchInputRTC:自律と操作の入替え(本学習環境では入替え機能は未実装)
・Odometry:オドメトリ推定
・LocalizeCenter:自己位置姿勢推定
・DispPosition:位置表示
SerialPortRTC
・ysuga様のysuga.netにて公開されているSerialPortRTCを再利用しました
・RTC群と3輪移動ロボットとでRS232C通信が可能となります
【新規に開発したRTC】
DataConversionRTC
・来訪者受付システムVer1.0内にあるシミュレーション用RTC「MotorControl」のアルゴリズムを参考に開発しました
・入力された目標速度を,3輪移動ロボットへ渡す動作指令値と,OpenHRP3のロボットモデルへ渡すトルクに変換することができます
CommunicationRTC(withOpenHRP3)
・OpenHRP3のロボットモデルと通信します
・OpenHRP3のコントローラブリッジです
DataIntegrationRTC
・CommunicationRTC(withOpenHRP3)とSerialPortRTCの出力を統合して,来訪者受付システムのRTC群へ渡します
●RTミドルウェア学習環境実行例
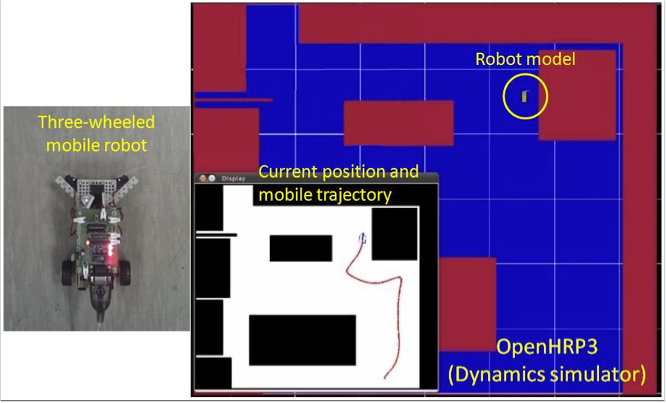
図2 RTミドルウェア学習環境実行中のOpenHRP3と移動軌跡の表示
●一般公開情報
本Webページにて以下の情報を公開しております(ダウンロードは,下から)
【3輪移動ロボット・ハードウェア情報】
・製作に関係する全情報
・部品表,ガーバデータ,電子回路図,PICプログラム
【ユーザマニュアル関連情報】
・RTミドルウェア学習環境の仕様や構築方法などの詳細な解説書
・ユーザマニュアルと関連ファイル群
【教育課程関連情報】
・テキスト,アンケート,テスト,教育課程実施可能な環境を構築するための資料とファイル群,教員用資料
【SI2011・RTミドルウェアコンテスト2011関連情報】
・発表スライド,発表原稿,概要スライド
●ライセンス(公開条件)
修正BSDライセンスに基づき配布致します.
ただし,再利用したRTCについては,各モジュールのライセンス条項に帰属します.
●RTミドルウェアコンテスト2011
3つの奨励賞を受賞させて頂きました.誠にありがとうございました.
・RTコンポーネント再利用賞 【提供:千葉工業大学 平井成興様】
・初心者にやさしいRTCで賞 【提供:菅佑樹様】
・ヴイストン賞 【提供:ヴイストン株式会社様】
●最新バージョンダウンロード
・ SI2011・RTミドルウェアコンテスト2011関連情報 (59MB)
・上記の一括ダウンロード(94.1MB)-> AllContents2_1.zip
旧バージョン(Ver. 2.0 2012年3月15日まで掲載されていたバージョン)
旧バージョン(Ver. 1.0 2012年2月まで掲載されていた初期バージョン)
●問い合わせ先
埼玉大学 工学部 機械工学科 設計工学研究室
〒338-8570 埼玉県さいたま市桜区下大久保255
●謝辞
本RTミドルウェア学習環境は,独立行政法人新エネルギー・産業技術総合開発機構「次世代ロボット知能化技術に関する研究開発の総合的展開」の支援を受けて実施されました.記して感謝の意を表します.
また,来訪者受付システムの再利用にあたり,富士ソフト株式会社,独立行政法人産業技術総合研究所,東北大学様,RTC再利用センターの皆様に多大なるご助言を承りました.本学習環境の開発にあたり,ysuga様のWebサイトを参考にさせて頂きました.本学習環境で用いる3輪移動ロボットの開発には,本学の先輩諸氏にご協力を頂きました.心から感謝致します.