RTミドルウエアを用いたエンジニアリングサンプル
Engineering sample of RT-Middleware
解説図・実験写真
-
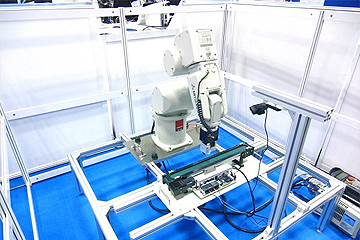
図1:ロボットシステム概観
カメラ機能とティーチング機能を利用し、産業用ロボットがベルトコンベア上を流れるワークに対しピック&プレースを行うシステム
-
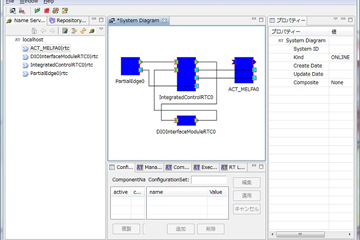
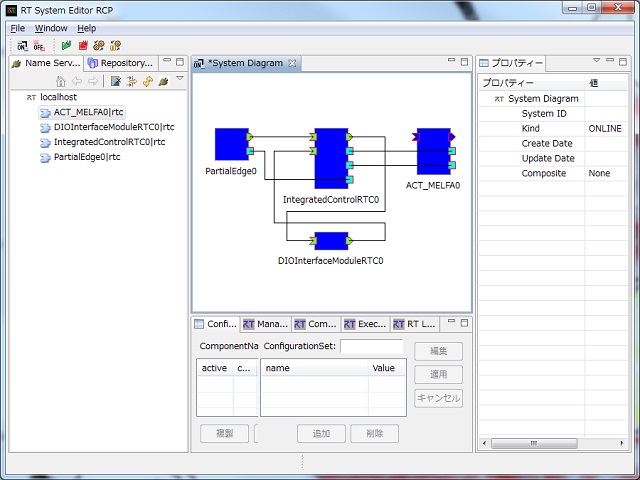
図2:RTコンポーネント接続
3つのハードウエアRTC(ロボット、カメラ、デジタルI/Oインタフェース)と統括制御用のアプリケーションRTCから構成
-
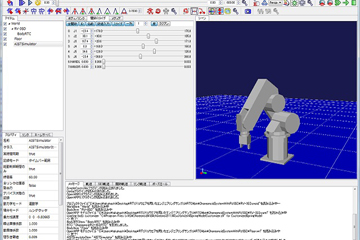
図3:シミュレーション環境
運動学・動力学シミュレータ「Choreonoid」を利用することで、実機がなくとも無償でエンジニアリングサンプルを体験可能
-
図4:将来的な社会貢献
RTミドルウエアの産業応用や人材育成により、ロボット市場拡大とロボット分野での国際競争力向上に貢献


研究概要
これまでのRobot Technology Middleware(RTミドルウエア、RTM)に関するプロジェクトでは産業応用を意識したものは少なく、既存のロボットユーザーへの普及の妨げとなっていました。そこで本研究ではRTミドルウエアの産業応用の可能性を評価するために、以下の特徴を持つエンジニアリングサンプルの開発を行っています。
- 実際の産業機器をRTミドルウエアで制御
- 産業用ロボットで必要とされる基本的な動作を簡単に再現可能
- 中小企業も導入容易な価格を目指し、ハードウエアは約51万円+6軸垂直多関節ロボットで構築
- 詳細なシステム構築方法、操作方法、解説マニュアルを配布
- 可能なものはすべて無償&オープンソースで公開、他は入手先を明示
参考文献
- ''RTミドルウエアを用いたエンジニアリングサンプル'', 2013国際ロボット展 新エネルギー・産業技術総合開発機構(NEDO)ブース.
- 高橋直希, 藤間瑞樹, 程島竜一, 琴坂信哉 : ''RTミドルウエアの産業応用を目的としたエンジニアリングサンプルの開発'', 第14回計測自動制御学会システムインテグレーション部門講演会, 1B2-4, 2013.